






 Originally introduced as the Ascension Mk1 Block II back in March 2018, this rocket was meant to be the heavy-lift variant to the orbital Block I, using as many as 4 solid rocket motors to help it get going off the pad with larger payloads. Eventually however as the Block I showed it didn’t have the power to reach orbit the Block II was shelved and the following year brought back as the Mk2 with the addition of the Viklun upper stage. The rocket was originally set to fly in late 2019 until doubts began to creep in about the performance of the new guidance fins in being able to turn the rocket over enough for a shallow orbital ascent. A test flight with the Mk1 was set for the end of the year instead but that was forced back into early 2020 when the KSC was attacked and the launch pad damaged. All this and more details can be reviewed in the mission timeline, which includes tweets dating back to the Ascension program’s inception in 2017. Having over two years to prepare for the launch of this rocket, very little issues were had in the final lead-up to its mission. The rocket was rolled out atop the Mobile Launch Platform and all three service towers were finally used, with the lower booms providing fuel to the two stages and the crew access extension giving power to the Viklun and Kerbin I probe cores. The 1.25m computer core of the Viklun stage is the first of its size and would guide the rocket during ascent using its extra space to hold two discrete CPUs for cross-check and redundancy.
Originally introduced as the Ascension Mk1 Block II back in March 2018, this rocket was meant to be the heavy-lift variant to the orbital Block I, using as many as 4 solid rocket motors to help it get going off the pad with larger payloads. Eventually however as the Block I showed it didn’t have the power to reach orbit the Block II was shelved and the following year brought back as the Mk2 with the addition of the Viklun upper stage. The rocket was originally set to fly in late 2019 until doubts began to creep in about the performance of the new guidance fins in being able to turn the rocket over enough for a shallow orbital ascent. A test flight with the Mk1 was set for the end of the year instead but that was forced back into early 2020 when the KSC was attacked and the launch pad damaged. All this and more details can be reviewed in the mission timeline, which includes tweets dating back to the Ascension program’s inception in 2017. Having over two years to prepare for the launch of this rocket, very little issues were had in the final lead-up to its mission. The rocket was rolled out atop the Mobile Launch Platform and all three service towers were finally used, with the lower booms providing fuel to the two stages and the crew access extension giving power to the Viklun and Kerbin I probe cores. The 1.25m computer core of the Viklun stage is the first of its size and would guide the rocket during ascent using its extra space to hold two discrete CPUs for cross-check and redundancy.
The Flight
Although no issues presented themselves during pre-flight a hold from the weather desk was called during the L-5min final general polling due to upper-level winds being outside launch commit limits. We had to be more careful than usual with upper-level conditions because of the large interstage in this rocket that could literally see it ripped in two if the upper stage strikes heavy winds going in one direction while the lower stage experiences winds in a different direction, an event known as shear. While the winds appeared to be trending downwards in the data received from the weather balloon, we couldn’t be sure whether it would continue. Having the entire daylight window available to us however a second balloon was launched to find out.
The countdown was recycled to L-30min and we waited for the balloon to make its hour-long ascent into the upper atmosphere (+18km), restarting the countdown so the L-5min polls would occur shortly after the weather desk was able to receive and analyze the data from the balloon. This time everything was GO, allowing the countdown to continue into the terminal count and it proceeded without further issue all the way to launch. Presider Theonard was present to witness this historic attempt and had the honor of calling out the final 10 seconds to lift off.
Unlike the Mk1’s T-6s ignition, the Mk2 ignites its same K2-X main engine at only T-3s because it does not need to throttle up any further – confirming good main engine ignition, the 4 SRBs are allowed to ignite at T-0s, with explosive bolts releasing them as the main engine support clamp also gives way. The combined power of the solid motors was able to lift the rocket mostly on their own with 272kN of total thrust while the main engine added 56kN at only 10% throttle. This produced an initial TWR of 1.8 to shove the rocket off the MLP and into the air to begin its ascent. Guidance kicked in immediately upon launch to begin the rocket’s pitch over program. It launched off the MLP already facing towards its ascent heading of 45° so no roll was necessary.
As the solid motor individual thrust peaked at 69kN 3 seconds after launch and began to slowly taper off, the main engine throttle was programmed to increase and hold a TWR of 1.7 until the SRBs were let go. However the throttle instead began to make adjustments at just 1 second after lift off and the rocket failed to maintain 1.7 TWR, falling to only 0.66 TWR by the time the SRBs were detached at L+32s. The main engine was then throttled up to full as planned, pushing the rocket forward with a TWR of 1.45 at 182kN of thrust. With the SRBs gone the guidance fins could now move twice as far in either direction without anything to impede them. This turned out to be unnecessary as even with the slower-than-planned velocity the fins were having to barely move to keep the rocket pitch on target.
At L+1min the rocket went supersonic and shortly afterwards at Mach 1.36 began to exhibit signs of “roll shake“, which we had hoped would not be an issue like it is for the Mk1. Although the effect persisted with varying amounts of severity all the way up to MECO, fin actuation mostly remained below 50% of full authority and the rocket was able to maintain both pitch over and heading.
The callout for Max-Q came at L+1m4s, peaking at 15.968kPa as the rocket passed through 10km. The ascent continued nominally into the upper atmosphere and all the way to MECO at L+2m14s with the rocket reaching an altitude of 42.134km. Thanks to the slower than planned start, the shutdown occurred just 20ms after the payload fairing was split open and shed when the rocket hit 42km. This was fortunate because exposing the KerbIn I payload was deemed necessary for attitude control of the Viklun stage since the probe could assist with its RCS thrusters.
Staging began immediately after MECO, with the Viklun orbital stage detaching from the lifter one second later and igniting a second after that as it cleared the interstage shroud. At only 43.5km when beginning to continue the ascent, the upper stage had to contend with a greater amount of air density than expected and unfortunately the meager thrust of the reaction control system was not enough to keep the nose from falling faster than planned just 1 second later. Everyone in Launch Control was forced to watch in dismay as the nose drop accelerated and the stage performed nearly a complete somersault. Coming back around upright, enough air was present to broadside the upper-stage and help the RCS halt the rotation. However the airflow then began to push the stage back in the other direction as the RCS continued to struggle.
SECO-1 occurred while passing through 60km at L+2m48s when the rocket’s apokee reached 100km. Still pointing nearly straight upwards it switched guidance modes to point the nose prograde but ended up going in and out of gimbal lock. Controllers had to scramble to send it commands that would enable manual steering just long enough for them to start moving it in the right direction before re-enabling the guidance routines. By this time apokee was rapidly approaching and no one had yet completed the work of determining the timing of the orbital insertion burn. The rocket did not have enough data storage to carry its own burn information and without these additional instructions (after it automatically tossed out the ascent routines to free up space) it would just fall back to Kerbin.
The Viklun stage with Kerbin I still attached passed through its apokee at L+5m while controllers continued to rush to modify the orbital insertion burn instructions. This had to be done very, very carefully because crashing the flight computer would also mean mission failure – there wouldn’t be enough time to recover and try again. Shortly afterward at L+5m24s the OIB commands were uplinked, telling the Viklun stage to just hold prograde and burn immediately. At this point there was nothing anyone could do but hope and wait. All eyes watched as the perikee diminished and became positive at L+6m05s. As it began to climb the fuel levels continued to fall. Chants of “Go! Go! Go!” began to fill the room as the perikee altitude continued to climb while fuel levels continued to dwindle.
Mixed emotions flooded through the Launch Control room when SECO-2 occurred at L+6m30s as the fuel was exhausted, leaving the rocket in a decaying orbit 3,916km x 68km as it continued to fall back towards the atmosphere. For the most part, everyone was happy that we were at least in a situation that gave us time to potentially still save the mission, however time was also working against us because the highly eccentric trajectory would take the rocket over 3 hours to complete. This was longer than the batteries carried by the Viklun stage would last. An additional complication was that the Viklun antenna would only pick up commands from within 1.5Mm and the Kerbin I antenna only 500km.
As all this was realized and contemplated by the mission team, the rocket exited the atmosphere at L+8m2s and was heading out of comms range in less than 12 minutes. This was not enough time to properly prepare and deploy Kerbin I, however although there were some failures in foresight during ascent planning the team that deigned Kerbin I took more precautions. The probe and orbital stage were able to share EC power, with the priority able to be set between both, one or the other. This meant we could activate the electrical system of Kerbin I and direct its power to supply the Viklun flight computers, but not do so until the orbital stage’s batteries had been exhausted. Controllers had time to set this up before the spacecraft flew out of comms range.
The main reason the orbital stage batteries wouldn’t last until the spacecraft came back into comms range was due to the inability for the Viklun computers to hibernate like the Kerbin I flight computer could. Despite the shared electrical power, the Kerbin I computer did not have the ability to communicate directly to the orbital stage and thus we couldn’t shut down the Viklun computers and have the Kerbin I computer hibernate, wake up and restart the Viklun computers. Having to leave the Viklun computers on also presented a possible issue in that the spacecraft would fly through the outer radiation belt while active without adequate shielding. While not as harsh an environment as the inner belt (the inclined orbital trajectory had the spacecraft pass over and under it) there was still a chance it could have failed to survive and arrive back in comms range dead or severely disabled.
Another potential issue was thermal control. Both the Viklun and Kerbin I were designed to be placed in a circular orbit, with equal time spent in light and darkness. The highly-elliptical orbit kept the spacecraft in the harsh heat of the sun for the majority of the time. Fortunately although the RTG on Kerbin I was not a functional power source it was still a functional radiator, the only one on the spacecraft. Before comms were lost the craft was put into a slow roll to allow for more even heating on its surface.
Thankfully after a 3h15m wait we were able to send signals to the spacecraft again starting at L+3h41m (15:26 local time) and found it to be in a healthy state, more than capable enough of finishing up the Kerbin I initialization and deploying it from its payload truss. The probe was let go at L+3h47m and with the orbital stage’s main batteries now dead the meager supply of internal power remaining was exhausted in the next 2 minutes, leaving it adrift and allowing the Kerbin I probe to continue on its mission to success. For the Ascension Mk2 however this mission was marked as a failure for not delivering the probe and itself into the proper orbit.
Lacking telemetry data and still passing through the very top of the atmosphere, we knew the stage’s orbit would eventually decay and return it to Kerbin. When and where were questions we initially could not answer. In the following days attempts were made to spot the stage during its aerobrake pass, which occurred at night with the sun visible over the horizon, but the stage was too small and non-reflective. Hoping it would pass over the Arekibo Radio Observatory so we could get a radar ping from it, scientists there were accommodating enough to temporarily suspend science operations for us to attempt tracking it. No returns were received however.
In addition to our attempts at direct observation, all of which ended up failing, Kerbin I was also performing aerobrakes each orbit and eventually enough data was collected to establish a reasonable drag average. This in turn led to a decay projection that we felt could be accurate to within a day. By March 3rd however we were forced to admit that not only was the prediction way off we also didn’t catch any sight of the stage re-entering, which would have occurred at night. Sky cameras were setup at all current surface locations but there was a large gap between DSN Central and Arekibo over which it could have fallen unseen, in addition to over plenty of water. Given that its trajectory did pass over KSC at times, we are happy it didn’t fall back on us!
Flight Analysis
Throttle Issue
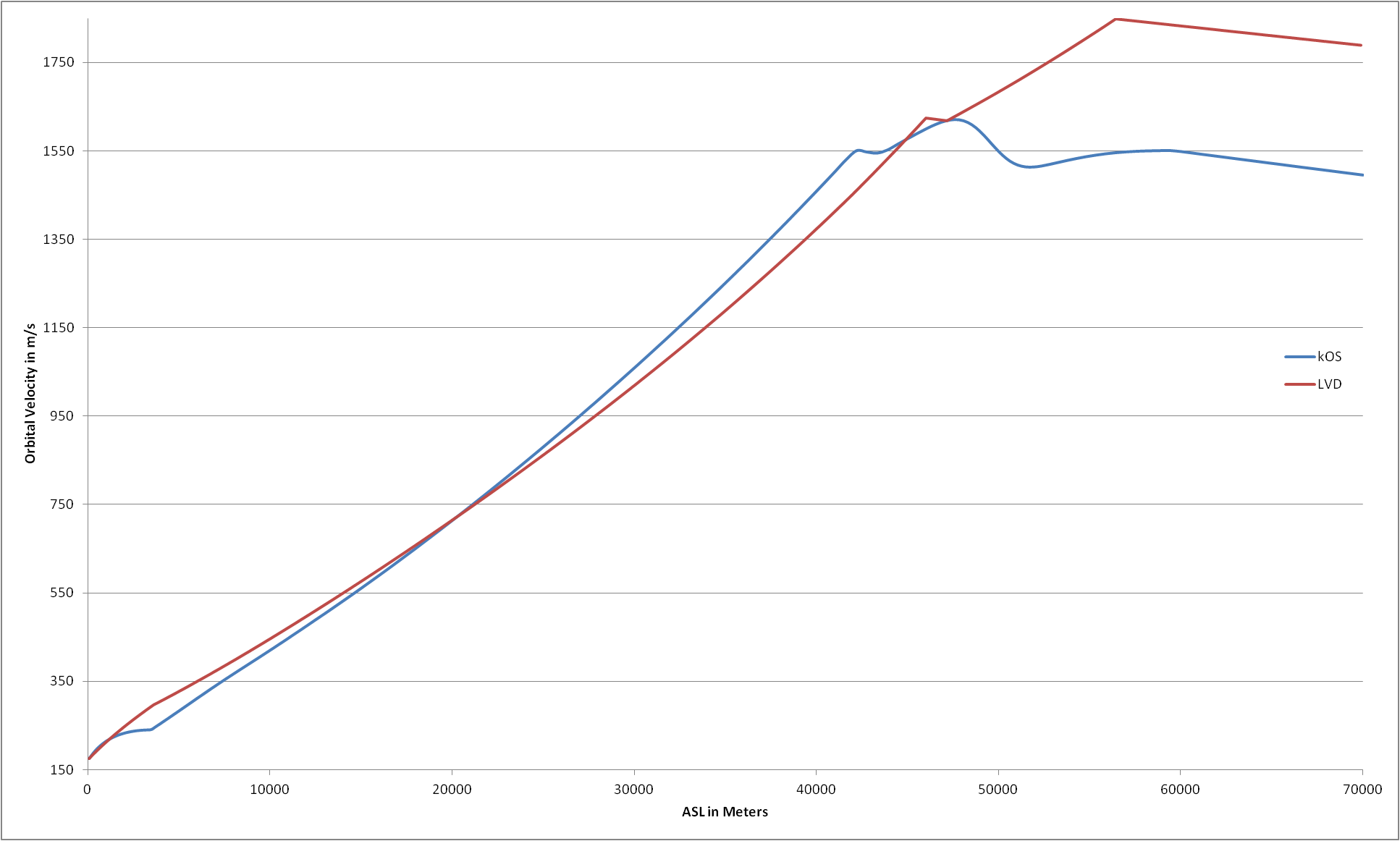
The second-most significant anomaly during the mission was the improper throttle management during the booster stage of the ascent. The throttling routine kicked in almost 3 seconds early and also failed to maintain a proper TWR of 1.7. This was not due to thrust issues – telemetry data shows all 5 engines were operating nominally. Review of the ascent code shows that improper calculation of the thrust coming from the solid rocket motors was to blame, causing the main engine to not properly set its power level.
Despite the slow start however, the rocket still managed to make it to within 4km and 74m/s of its expected altitude and velocity at the point of MECO.
Click for full size
Viklun Stage Somersault
Despite nearly regaining velocity and altitude, upon stage separation and engine ignition the rocket was unable to maintain proper attitude. Starting off at MECO with a pitch angle of 13.64°, decreasing an average of 0.54°/s over the last 10 seconds, that rate increased to an average of 3.46°/s over the next 5 seconds. The rapid drop in attitude was due mainly to the thrust from the RCS being unable to overcome the aerodynamic forces pushing the nose down at an increasing rate in addition to draining fuel shifting the CoM further and further towards the rear.
Although we initially thought the RCS system had finally won the fight when the rocket stood upright and didn’t complete the flip over (its first goal would have been to stabilize the rocket before attempting to return to proper pitch) it was not apparent at the time that the rocket had begun to tip the other way in the short time remaining before SECO-1. Later, when watching Kerbin I aerobrake we saw similar behavior in the probe being stood up and knocked back even in air thinner that what the Viklun stage was traveling through. Natural aerodynamic forces were what ultimately allowed us to saved the mission.
Double Max-Q
This was not a real issue but is something that is noticeable if you watch the ascent telemetry playback. You’ll see the dynamic pressure peak during the SRB stage and then peak a second time after the boosters have been dropped. If you look through the Operations Log in the telemetry data you’ll see that the flight computer only registered the first Max-Q. This is because Max-Q plays no significant role in the ascent and is only expected to happen once, so after the event is logged, the flight computer no longer wastes processing cycles looking for it. The lack of proper throttling caused the first Max-Q peak where it was not supposed to occur.
SRB Impact Near Runway
Another effect of the engine throttling issue was the rocket traveling lower and slower than planned when the SRBs were decoupled. They were let go with about 1s of burn time left to make sure they were carried away from the rocket when pushed aside by the decouplers. With the main engine throttled up the rocket would quickly outpace them and remove any chance of collision. However with the rocket moving slower than planned they actually were able to fly up past the rocket, thankfully not hitting it in the process. One of the SRBs however, the one let go on the side facing towards KSC, was thrown back at us and could have caused significant damage/injury if it had fallen a bit closer. Construction work was in progress on the new taxiway adjacent to Rwy09/27 and the booster fell barely 100m from workers.
Future Plans
To mitigate any possibility of the solid motors reaching KSC after decoupling, they could be carried longer after burnout, although this would require stronger decouplers to make sure they are pushed away properly, especially the one riding “on top” of the rocket as it continues to pitch over. They could also be fitted with self-destruct devices to shred them seconds after they are released, similar to how we took out the fins of Progenitor rockets.
Allowing the orbital stage to maintain altitude within the atmosphere while lacking an engine that can steer will require stronger thrusters. While R&D is working on monopropellant fuels with greater thrust, they are also highly toxic compounds that would require new procedures and infrastructure in order to work them into spacecraft assembly. A simpler solution would be to make use of smaller engines that also burn liquid fuel and oxidizer. Since these wouldn’t be carried by the payload (where torque would be greatest), they would have to be placed near the engine and thus could make use of existing plumbing. Eventually these would be replaced with a main engine that can gimbal, but that is still under development with the Progeny Mk7 series.
There was some disagreement about whether the Viklun engine may have made contact with the interstage shroud after being decoupled. Footage is inconclusive since we knew we would be unable to recover video from the stage and were only able to beam back 4fps during ascent. There’s also nothing in the ascent data to show any impact affecting the rocket. Regardless, everyone agreed that if the impact didn’t happen it did almost appear to happen and as a precaution extra force should be applied to pull the lift stage away faster, likely via small solid rocket motors like the ones used for the Ascension Mk1 LES.
While it’s unfortunate roll-shake remains a thing and even though it does not have a great effect on the trajectory of the rocket, the extra vibrations caused by it remain a concern for the payload and the extra drag remains a concern for ascent modeling. We are more convinced now it is something in the guidance routines causing control oscillations to develop and we will see if they can be dampened by reducing control authority limits. Jeb’s upcoming mission already has had its guidance controls adjusted so that the horizontal fins only provide pitch while the vertical fins allow for reduced roll/yaw. (These were changes made during the original build, not in the time between launch attempts).
More thought and planning will need to be put into what could go wrong during ascent – as it is we were very lucky that the two main problems of throttle control and attitude control did not lead to a mission failure like they could have. Our ascent routines are still very simplistic to avoid issues from over-complexity but this does make them more susceptible to unforeseen problems. However as we gain experience we will become better at anticipating future problems.
When will the next Mk2 launch? The current goal is towards the end of Q2 2020, which will see it loft another test satellite, this one being the prototype for future communication satellites.
