






 After failing to achieve orbit on our first flight of the Ascension Mk1 lifter, changes were made so that the second flight covered here in this analysis would have a better chance at becoming the first spacecraft to circle the planet. As with the first mission, the goal was to place the craft in a decaying orbit so it would eventually return to Kerbin without us having to also install any cold gas thrusters or make the engine able to re-ignite and add further complexity. The mission also used a brand-new K2-X engine and a more aggressive ascent profile.
After failing to achieve orbit on our first flight of the Ascension Mk1 lifter, changes were made so that the second flight covered here in this analysis would have a better chance at becoming the first spacecraft to circle the planet. As with the first mission, the goal was to place the craft in a decaying orbit so it would eventually return to Kerbin without us having to also install any cold gas thrusters or make the engine able to re-ignite and add further complexity. The mission also used a brand-new K2-X engine and a more aggressive ascent profile.
The Flight
Before the rocket even left the ground, once it was vertical and hooked up on the launch pad a 30-second hold-down firing was conducted. This allowed us to ensure the newly-built K2-X was functioning as intended and also enabled the launch team to set much better constraints for engine chamber pressures during ignition and run-up to launch thrust. This was a cause for abort during the first launch attempt when the constraints were set to expected values based on data from testing the engine, which changed enough over multiple tests to become invalid.
The following day brought mostly cloudy skies to the area and caused the weather team to put the countdown on hold at L-15 minutes until skies began to clear from the southwest. Besides the slight weather delay, which lasted about 48 minutes, no issues came up during pre-launch operations. Some minor troubles with the engine system and communications the previous day were resolved during the hold-down test and did not resurface.
At precisely 13:24:54.00 local time the K2-X engine roared to life at 10% thrust. The Automated Flight Control System took measure of the engine performance and finding nothing outside of constraints after 3 seconds commanded the engine to throttle up to launch thrust of 1.2 TWR, which at its launch mass of 10.3t comes to roughly 121kN @ 70% throttle. 3 seconds after that, confirming that launch thrust had been reached, at 13:25:00.02 the engine support collar clamps were released and the rocket began its initial ascent. At L+3s the rocket cleared the launch tower and the AFCS commanded full thrust of 170+kN to push for Max Q. Guidance control was also enabled at this time, which straightened out the rocket’s slight roll to hold a heading of 45° while also beginning to pitch over, aiming to reach close to 60° by 10km ASL.
Passing through 7.8km traveling at 411m/s (mach 1.3) the rocket reached Max Q of 34.571kPa at L+44s. At this point the throttle was reduced and locked at a TWR of 2.5 to maintain a constant acceleration throughout the remainder of the ascent while not pushing the rocket to speeds that would create excess heating or stress on the control surfaces while in the lower atmosphere. Unlike the previous launch, no roll wobble was detected as it went supersonic.
Reaching 10km shortly afterwards at L+50s the rocket was pitched over at 66°. It next had to reach ~45° by 20km. At this point we also began to see the perikee of the trajectory begin to fade more rapidly as the pitch-over increased.
The rocket came closer to its intended pitch target when it powered through 20km at L+1m9s nosing down to 47°. By now throttle had been reduced to 74% and speed was just shy of 700m/s (mach 2.3). The next pitch target was 15° by 35km.
A short time later at L+1m15s the rocket began an unplanned roll, slowly, towards the left. This roll remained uncorrected by the flight computer for some reason, but yaw control continued to work to keep the rocket pointed roughly along its intended 45° heading while the nose continued to (mostly) drop under pitch control.
At L+1m33s the rocket had reached 35km, traveling at just over 1km/s with throttle pulled back to 59% and the nose pitched down only to 26°. By this point the flight controls had become mostly ineffective as the air density decreased to levels where pressure on the control surfaces could no longer affect the orientation of the rocket. It continued to roll, which did an effective job of holding its heading, and also continued to pitch over into a natural gravity turn.
Entering space at L+2m25s the K2-X continued to thrust nominally, throttled further back to 38% for just 73kN of thrust. Perikee continued to vanish faster and faster and the rocket was by now traveling at 1.9km/s. Several seconds later at L+2m39s the tanks ran dry and the engine flamed out. The rocket was moving at 2.1km/s with a perikee of just -152km (it starts at -598km).
L+11m5s saw the rocket pass through an apokee of 267.503km before beginning its fall back to Kerbin. The rocket was continuing to roll but extremely slowly and still mostly pointing along its prograde vector. This continued until L+18m23s when Ockr, the comm station furthest to the northeast, lost signal to the rocket over the horizon as it was still descending towards the atmosphere.
Because the rocket was not recovered, the remainder of the flight can only be speculated on in the following section.
Flight Analysis
Failed Recovery
We chose to not bother staging an airship downrange in case we needed to capture telemetry data from the rocket during descent because our main objective was to reach orbit. Failing that, recovery of the rocket was only a secondary goal. Once signal was lost, all we could do was use the data to project where it would enter the atmosphere and try to determine where it could have landed. This is the result, which shows its trajectory up to atmospheric interface and where it may have traveled to before landing:

We did have airships staged in both Ockr and Kravass ready to head east or west as needed for recovery operations and the one in Ockr was dispatched shortly after launch. It spent two days searching for any sign of the rocket but failed to pickup a radio locator beacon nor did it hear any sonar pings when it dropped a buoy into the lakes in the search area. A lower sweep did not turn up any signs of surface impact, which leads us to three possible conclusions:
- The rocket had a guidance malfunction on re-entry or the planned guidance maneuver of pitching up to 15° for a glide broke the rocket up and most of it burned up or hit the ground separately to form smaller impacts spread out over a wide area that would have been harder to see
- The rocket made an uncontrolled landing in the water and was too damaged to send out a sonar signal
- The rocket flew out of the search area entirely
The reason we included #3 as a possibility is because we have no idea how far the rocket will glide if it manages to do as it is programmed and pitch up to 15° once it has managed to level off in the lower atmosphere. We also have no guarantee the rocket was able to hold near to the 45° launch heading – it is simply instructed to hold whatever heading it is on when it re-enters the atmosphere. The fact that it was rolling and slightly tumbling while in space means it could have been on a heading well off 45° upon re-entry.
Unfortunately the search zone marked in yellow was all we could afford to do in looking for the rocket. If it is still out there, lying on the surface, perhaps someday someone will find it. They’ll know who to contact.
Ascent Profile
The pitch-over for the first launch was a lot more hard-coded into the ascent routines while at the same time a lot less specific. For example it told the rocket to increase its rate of pitch after passing Max Q but this rate increase was not targeted for any desired pitch by a certain altitude – it just made the rocket tip over faster and wherever it ended up after a certain amount of time was where it ended up.
This time, knowing we needed to get more horizontal faster, we used a quadratic fit formula to define at what altitude in the ascent we wanted the rocket to pitch to what degree. We’ve already covered what the rocket was supposed to do, now let’s take a look at why it didn’t end up flying as expected.
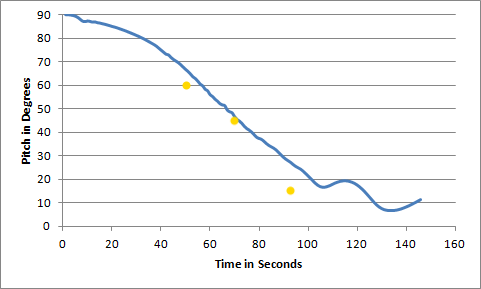
The yellow dots are the pitch targets for 10, 20 and 35km
Although we missed the pitch target for 10km, if you take another look at the graph for the quadratic fit formula linked above you’ll see the line isn’t supposed to pass through the target and the rocket is actually well on track at this point. By the time it reached 10km control deflection was maxed out, which meant the rocket could not have turned over any faster than it did given its speed, which also generated lift that wanted to bring the nose back up. Still, with max deflection it almost managed to hit the second pitch target dead on. Then at 80s you see the line start to slightly level out – this was the point at which the rocket began to roll, which also caused the control surfaces being used for pitch to become the control surfaces being used for yaw and vice-versa. Essentially the rocket was unable for periods in the roll to do a good job at both and this caused the nose to eventually oscillate and the pitch to go up and down. This was the final nail in the coffin for the rocket not making its final pitch target before the air grew too thin for proper control.
As of right now we still don’t really know why the rocket failed to correct the leftwards roll that began around 80s into the flight. The previous launch data showed constant minor roll corrections to keep the rocket level, so we know the rocket has a natural tendency to want to roll left ever so slightly. There was some definitive roll correction at the start of this launch, so why the roll correction ceased during flight is unknown. Engineers are still seeking answers and will apply any that are found to the next flight.
Good Engine
After this flight we can confirm the K2-X engine design is solid. Due to the failure during the first launch we were unsure whether it was something that occurred during the flight or that the engine was just fatigued from multiple test firings prior to the flight. Review of engine data from this mission showed absolutely nothing out of the ordinary occurred the entire time the engine was running. NovaPunch had held up producing any further K2-X engines in case it needed to redesign some component but now it can resume production with confidence.
Future Plans
Unfortunately due to the halt in production of K2-X engines we will have to wait until September at the earliest to receive the first new engine. After that however they will begin to be delivered more and more frequently and we can also still assemble the rest of the rocket while we wait. This means that late-September or early-October is currently the earliest we plan to launch the next Ascension Mk1 rocket.
Hopefully we will have the roll issue worked out by then, but if not then we’ll just have to see how the flight goes and use that additional data to see if we can’t crack the problem should it happen again.
Although the rocket failed to pitch over as much as we wanted, we still feel orbit could have been achieved had we been going faster sooner. Greater speed will allow for more pressure on control surfaces in thinner air possibly allowing for a slightly longer period during which they remain effective on ascent. Now that we know based on data from the first flight’s re-entry just how much pressure they can take we’ll be removing the 2.5 TWR throttle lock on the next flight. This doesn’t mean we will just keep the throttle wide open, because that would also shorten the burn time of the engine, but we will definitely accelerate faster.
The next launch date will be set as soon as NovaPunch can confirm when the next new engine can be delivered.
