






 Nearly three months after the last launch, this mission took so long to set up partly because it would be the first to carry the Mk1 capsule into space, and first the capsule needed to complete testing and certification. You can review that whole process here if you like. It then had to undergo trials of the Launch Escape System so that it could be fully fitted for flight – but not the beat-up test capsule, we had to wait for a new capsule to arrive. There was also an engine explosion during testing and a Progeny Mk6 launch that was delayed while the Monolith temple cooling system was setup, not to mention the fins on this lifter needed to be angled for greater pitch control. So, a lot of work led up to the fourth Ascension Mk1 flight. Let’s have a look at how it went.
Nearly three months after the last launch, this mission took so long to set up partly because it would be the first to carry the Mk1 capsule into space, and first the capsule needed to complete testing and certification. You can review that whole process here if you like. It then had to undergo trials of the Launch Escape System so that it could be fully fitted for flight – but not the beat-up test capsule, we had to wait for a new capsule to arrive. There was also an engine explosion during testing and a Progeny Mk6 launch that was delayed while the Monolith temple cooling system was setup, not to mention the fins on this lifter needed to be angled for greater pitch control. So, a lot of work led up to the fourth Ascension Mk1 flight. Let’s have a look at how it went.
The Flight
No delays occurred leading up to launch and the rocket lit its main engine at T-6s with 10% throttle for a check of the engine performance before throttling up to and holding a TWR of 1.2 (126kN) at T-3s. The engine clamp released at 16:12:00.08 local time for an on-schedule launch. Climbing 8.1m after another three seconds the rocket had cleared the tower and the AFCS kicked in guidance control to begin dropping the nose towards the horizon and heading downrange while throttling the engine up to full thrust, which near sea level is ~172kN. It was now time to see if this rocket could properly follow the pitch profile programmed into the guidance system.
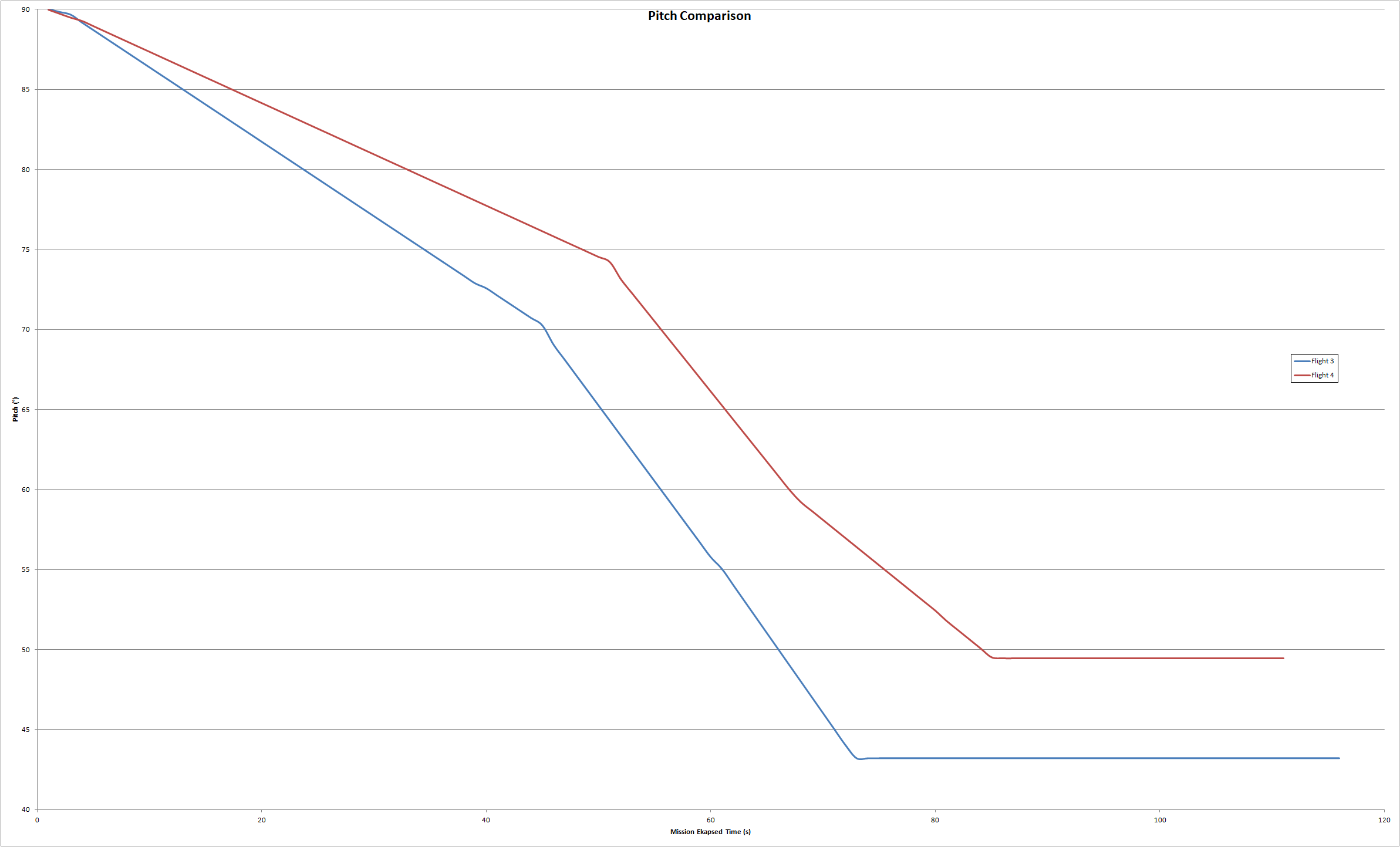
The rocket climbed faster and higher, breaking the sound barrier and shortly thereafter reaching maximum dynamic pressure at L+47s with 32.729kPa @ 8.465km while exceeding 470m/s of velocity (Mach 1.3). By this major point in the ascent the rocket had remained largely stable with no roll shake but did experience a relatively large pitch movement that stood it more vertically for a second. Control authority was nowhere near saturated, with the elevators actually still working slightly to counteract the natural tendency of the rocket to pitch downwards due to its horizontal stabilizers being angled at 5°. By comparison at this time the previous flight had been unable to push the nose down any further.
As the rocket continued to go supersonic some minor roll shake began to develop but the guidance computer was able to maintain heading without issue as the rocket reached its next ascent milestone of pushing the trajectory out of the atmosphere at L+1m18s. At this time, traveling through the upper atmosphere in excess of 1km/s noticeable heating began to occur, creating a plasma shockwave for ~18s that did affect but not completely disrupt telemetry data. Pitch control saturation had increased to just short of 50% and by this point the rocket had reached its final target pitch of 49°.
Although slow to correct its downward pitch after reaching 49° due to the lack of air for control surfaces to work against, the rocket was still able to maintain this angle to within half a degree all the way up to the final ascent milestone of main engine cut-off (MECO) at L+1m51s, 66km ASL just 2s prior to reaching space while traveling at 2.134km/s. The apokee of the trajectory was 423km, 52km lower than expected from the Launch Vehicle Designer but still placing it on course to reach the water east of Ockr as planned.
The lifter stage remained attached as the rocket coasted up above the atmosphere and was decoupled as it passed through 100km at L+2m13s. Immediately afterwards the capsule Reaction Control System switched on to thrust away from the lifter stage for 10 seconds. However at the same time the mission control team was stunned to receive a command update from the AFCS saying the Launch Escape System had activated as if the lifter stage had exploded and was now carrying the capsule off course.
After the LES motors burned out mission control immediately got to work sending up commands to stabilize the capsule, which was tumbling about thanks to the kick motor at the top of the tower sending it off radially. The RCS was able to stabilize the capsule to hold a prograde orientation and controllers could tell by the rate of movement the LES tower had been jettisoned properly. However since the escape system triggered as if it were an ascent emergency the parachutes had been armed to deploy, so controllers had to send up a new command that would disarm them so they would not attempt to deploy as soon as the capsule hit the atmosphere.
Back under control by L+7m, controllers began to send commands up to the capsule to have it re-orient and point in various directions relative to its trajectory – normal, anti-normal and radial-in were all handled without much trouble, although the capsule did seem a bit “drunk” and meandered about more than anticipated in its movements between the positions. Going from radial-in to radial-out for some reason gave it the most trouble of all, to the point where after two minutes of watching the capsule flounder about controllers told it to point to the nearest orientation it had reached before (in this case anti-normal) then try again to point radial-out. This time it managed to find the proper orientation as the capsule floated through 505.593km apokee – significantly higher than before thanks to the LES.
Still, the capsule seemed to be struggling to maintain its orientation more than it should (the RCS is off-center and not expected to be perfectly stable) so controllers finally sent up a command to completely unlock automatic steering control before re-enabling the system after commanding the capsule to point retrograde. This did seem make the capsule more stable but by now cold gas levels were close to empty and re-entry was still 6 minutes away so the RCS system was switched off to conserve fuel. Due to the unbalanced RCS thruster placement the capsule was in a lazy drift off retrograde once the RCS was disabled but it did not rotate too far. About 30s prior to contact with the atmosphere the system was switched back on and was able to correct the capsule’s orientation to point the heat shield along the line of travel.
At L+22min the capsule began re-entry into the atmosphere traveling over 2.2km/s and the RCS system was switched off to allow for a ballistic descent. Falling through 50km signal was briefly lost due to the plasma generated by the heat of air friction from to the supersonic shockwave. 24s later signal was reacquired as the capsule passed through 13km. During the time it was out of contact heat and pressure rose to their greatest levels with the heat shield surface registering 1,882.7K (2,929°F/1,609.55°C) @ 19.5km and the pressure climbing to 78.812kPa @ 16.5km. All this produced a force of 17 peak Gs as the thicker atmosphere slowed the capsule down.
Just seconds after signal was reacquired the capsule slowed down enough to pop the parachutes at 11.736km. Still traveling too fast to fully deploy them, they remained reefed and helped to add extra drag to continue to slow the capsule as it fell the rest of the way towards the ocean below. Although we had aimed to land in the water the LES mishap caused the capsule to come down over 100km from our intended landing site, which was closer to shore and with better line of sight to the Ockr relay comm tower. So the horizon cut off signal before we could receive notification from the capsule that the chutes had been fully deployed to slow it for a safe splashdown.
A tense wait of several hours ensued to allow for the recovery vessel to sail the distance from its original station, locate the capsule (and heat shield, which decoupled near the water to reduce damage and allow the float collar to deploy), perform recovery and then sail back within communications range. Finally we received confirmation that the capsule had splashed down without issue, the heat shield was found adrift nearby, and the final mission length was posted as 25m55s, with the capsule splashing down 749.175km downrange from KSC.
Flight Analysis
Alright time for the deep dive. In the previous flight analysis we took a look at the performance comparison between the actual mission and the trajectory that was planned in Launch Vehicle Designer. The analysis was unable to look too closely however because of how much the rocket deviated from the planned ascent thanks to its inability to pitch downwards fast enough. This time the rocket suffered no loss of pitch control and was able to fly up to space in the manner that was intended by the guidance computer, so we can do a much better direct comparison between the two on this mission.
Pitch Authority
One of the fears of pitching the entire stabilizer to any degree was the increased surface area forcing the nose downwards would be too great for the smaller control surfaces to overcome, causing the rocket to eventually nose dive. In order to avoid this we started out with a conservative angle of just 5°. In the early stages of the flight the elevators would actually be working opposite the fins to lower the nose slowly and that is indeed what we saw in the full telemetry data, with control surface positions ~50% deflected upwards for the first 5km and falling to 0% by 10km when they started to help the rocket pitch over downwards.
Click for high-resolution version
Something else to consider is the fact that the pitch profile for this mission was much less aggressive than the previous one, which required a maximum pitch rate of 1°/s at its steepest. The pitch profile for this flight only required a maximum pitch rate of 0.87° as designed. However the rocket’s guidance system does not precisely follow the above plots because we would like to avoid abrupt changes in pitch as much as possible, so we run the points at which the linear pitch amount changes through a quadratic fit function to produce a smooth curve. Looking at that plot you can see the curve does not precisely pass through all points which means the rocket ascent won’t be exactly as designed in LVD, which means that when we mention the rocket deviating from the planned ascent for the past launch and sticking to the planned ascent for this launch we are actually referring to this plot not the one the LVD produced above.
On this ascent the rocket was able to sustain an average pitch rate of 0.5°/s while only approaching 50% of maximum control deflection. For 3s in the lower atmosphere between 8 & 9km pitch rates were at 1.1°/s when the control surfaces passed through neutral and began to help turn the rocket over. This is enough to convince us that the rocket with its 5° angled horizontal fins would have been able to fly the ascent path programmed for the previous mission and has control authority for even steeper ascents.
LVD vs. Actual
Now that you have a better understanding of how the rocket flew itself into space, we can consider how its performance differed from what we expected based on the LVD simulation, which said the rocket should have reached an apokee of 475km when its powered ascent only took it to an initial apokee of 423km. This difference of 52km is actually not too bad, and the trajectory the capsule was on as it left the atmosphere would have still landed it within our intended target area over the water east of Ockr. So for the purposes of this mission, the LVD was accurate enough, but what if we want future missions to hit a more precise location in space after launching into orbit or come back down to a more precise location during a sub-orbital flight?
The main issue is the difference in how the rocket flew compared to the “rough” ascent profile created in LVD. In the future we can add more pitch points to the ascent simulation to allow for a smoother pitch-over similar to the actual rocket, with changes of linear pitch occurring at points the quadratic fit formula can place closer to or on the plot it produces.
Despite making the simulated ascent profile closer to the actual one there’s another factor that is hard for us to account for still, which is drag. Drag is largely dependent on the configuration of the vehicle and we don’t have enough examples of various rocket shapes yet to predict drag accurately and have to just use past data. For the previous flight, which used a relatively blunt-nosed test mass, the average drag coefficient (Cd) for the ascent was 0.272. This flight, which had the LES spearing through the air ahead of the rocket, produced an average Cd of only 0.124 – so we doubled the amount of drag applied to this flight in our modeling. We’ll get better at this as we acquire more flight data.
Related to drag is the amount of surface area that comes into contact with the airstream, which can increase as the rocket’s Angle of Attack increases and it points further from the velocity vector as it pitches over. We can easily calculate the surface area of the straight-on rocket but are still working out a way to calculate how much additional surface area should be considered in the ascent for side drag losses. Additional drag area to consider is the amount the control surfaces are deflected into the air stream to steer the rocket, which is also difficult to model currently.
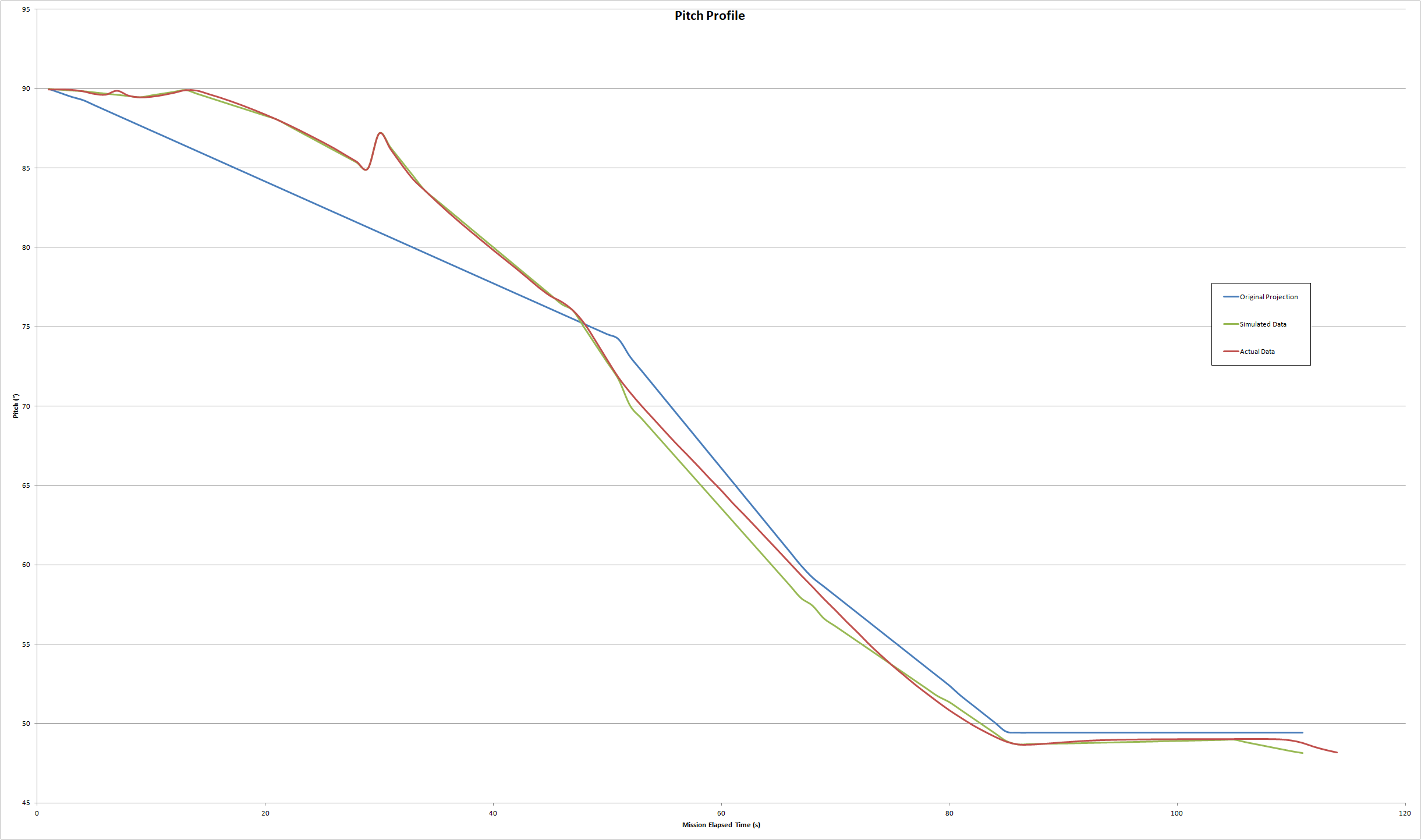
We still have more work to do in order to figure out just how accurate we can get with LVD, but thanks to the proper ascent of this flight we can take the data and attempt to reverse-model it. This is a whole other project, but here is what we have managed so far:
Click for high resolution version
The discrepancy visible towards the minute mark as the rocket dips below 70° is a sign that something is wrong with either the data we’re giving LVD or the simulation that LVD is running – or maybe a bit of both.
Looking at the recent plot above you’ll see a relatively large deviation in the pitch profile as the rocket appears to waver up and down. We saw a similar thing happen during the previous flight however because the rocket had less control authority it was barely noticeable and we weren’t sure if it was actually an issue or just some noise in the telemetry data. Now we can conclusively say this is an issue, and our best guess would be the reliance on the terrain radar during the early ascent stage. If you look at the guidance code that controls the pitch rate you’ll see it’s closely linked to the radar altitude and the bump in the pitch plot above corresponds nearly with the radar altitude fluctuating as the rocket clears the raised terrain around the launch pad but then passes over the raised terrain of the runway. This early in the ascent these altitude changes of just a few meters has a much larger affect than later on when it is higher and passes over the more gradual terrain drop towards the water. Testing this theory is an easy code change for the next flight.
Although it had a large impact on the mission thankfully figuring out what went wrong here wasn’t all that difficult upon review of the code responsible for decoupling the lifter stage. In that function there should have been a statement disabling the checking of the existence of the fuel tank. So when the capsule was decoupled and the fuel tank was therefore no longer attached to it, the flight computer thought it had exploded and fired off the LES. A simple oversight that did not cause the mission to fail but did rob us of the chance to see how well the LES was able to brake the capsule during re-entry for potential use in other emergency scenarios such as where the capsule is overshooting its target, runs out of fuel to de-orbit on orbital missions or the chutes have failed to arm.
Capsule Control
Unlike the test mass of the previous mission which had nose thrusters, the capsule was not able to use these because up there was mounted the LES and parachute whereas the test mass had radial parachutes. However the four thrusters placed at the bottom pointing aft and the two side thrusters used for rotation were enough to allow it to orient in any direction, proven through testing while coasting through space.
Troubles were noted in getting it to orient properly however, and the suspicion is that the guidance system was not properly disabled once the capsule had separated and it was still trying to hold the 49° pitch and 45° heading it locked into during the final stages of ascent. Why the command to unlock the steering was not properly processed by the flight computer is unknown, but when it was manually sent up by controllers it definitely made control of the capsule easier.
Capsule Life Support
Our test dummy Greggery came back with plenty of data from his flight through space and all of it was promising. The capsule ECLS systems functioned as designed and kept the interior pressurized with a breathable atmosphere throughout the flight. While he didn’t eat or drink anything, the required amounts of food and water for the mission were also on board.
Re-Entry Heating and Gs
Coming back down to Kerbin was quite the ride and a little bit rougher than intended thanks to the increased steepness of the trajectory after the LES misfire. That did give us some good data on extreme conditions however so we can’t really complain and it’s not like anyone’s life was in danger. The heat shield, as mentioned earlier, encountered temperatures as high as 1,882.7K (2,929°F/1,609.55°C) as it approached the lower atmosphere. The surface of the shield begins to ablate away at 500K so we did see some loss of material this time – but only about 3%. The interior of the capsule during re-entry did not exceed 292.7K (67.19°F/19.55°C), which is great news since last flight we did not have the telemetry data to tell us just how hot things got.
Coming down from over 2km/s of velocity as it slammed into the thicker atmosphere resulted in a peak force of 17Gs, which while medical experts say is survivable it wouldn’t be without some potentially serious physical side effects that could still endanger the astronaut. Ideally we would like our crew to receive no more than 14Gs of force while on a ballistic return from space. Had the capsule stuck to the planned trajectory though it’s likely we would have met that target.
Launch Pad Infrastructure Check
Lead Engineer Simon and his team conducted a thorough inspection of the launch pad, engine clamp and service towers after this mission to see how the rocket exhaust is impacting them. The good news is that they are faring far better than we had hoped, which means future Ascension missions could leave the pad at full thrust if needed, although Simon has urged the Ascension team to take it easy as the rocket begins its ascent when possible .
Future Plans
Already in progress is the adjustment to two of the three remaining lift stages to angle their fins 5° from vertical. We considered upping the angle to 7° but while the rocket was working to maintain pitch in the far upper atmosphere control deflection was maxed out before the rocket reached space, so any further pitch of the stabilizers would cause the rocket nose to drop as it exited the atmosphere.
The capsule sustained so little damage on re-entry that we can use it again – for another test flight at least. We will want to disable pitch/yaw inputs from being sent to the rotation thrusters as well to hopefully save some cold gas and make the capsule easier to control. The next heat shield to be attached will also be 75% thinner, saving mass. It will attempt to re-fly the same mission as this one with some minor adjustments to ascent to aim for a more comfortable return trajectory and also allow for the LES retro-fire test.
The capsule that we used for the pad abort tests is not capable of surviving a flight through space and re-entry but it can serve one last time as a test article for use in an ascent abort test. This will be placed upon the one lift stage that is not having its fins modified so we can schedule it sooner.
The second new capsule that was ordered will be readied to carry the first astronaut into space on the third and final Mk1 lifter that is currently under preparation – of course the only problem is that it doesn’t have an engine and the K2-X investigation has yet to release its findings. However we’ve gotten a wink and a nudge from investigators to “continue as normal” in this regard so we expect some good news in a few days. It will still take time to finish manufacturing the engines that were put on hold when the test explosion happened however which is why we have the other two lifters getting ready to fly first.
Finally, we will continue to improve our use of the Launch Vehicle Designer with these future missions and also hopefully have a better idea by then what an acceptable error margin is from the simulation. Stay tuned to our twitter for updates on the three upcoming Ascension launches!
