






 Although the original goals of the Progenitor program ended at reaching space, the decision was made to attempt to create an alternative means of reaching orbit for smaller payloads that could be cheaper than a larger Ascension rocket and faster than having to wait for multiple small satellites to travel up together in order to justify the launch. The Mk7 series of rockets will aim to achieve this goal through incremental design just as the previous Progeny rockets worked their way up into space. Along the way they will test new technologies to apply to Ascension rockets. The first flight of the first design iteration, the Mk7-A, set out to see how well the rocket could handle a maximum thrust ascent while testing new guidance fins and a vectoring engine.
Although the original goals of the Progenitor program ended at reaching space, the decision was made to attempt to create an alternative means of reaching orbit for smaller payloads that could be cheaper than a larger Ascension rocket and faster than having to wait for multiple small satellites to travel up together in order to justify the launch. The Mk7 series of rockets will aim to achieve this goal through incremental design just as the previous Progeny rockets worked their way up into space. Along the way they will test new technologies to apply to Ascension rockets. The first flight of the first design iteration, the Mk7-A, set out to see how well the rocket could handle a maximum thrust ascent while testing new guidance fins and a vectoring engine.
The Flight
After some modifications were needed to the launch pad support arms and the rocket’s umbilical connection ports, the rocket was rolled out for a second time and hooked up one day in advance of the original launch time on Thursday, June 20th. However news from the downrange tracking station in Ockr caused us to scrub the launch when the relay antenna setup for allowing the rocket to stay in contact with KSC through chute deployment failed to test well. The relay was fixed over the weekend and the launch went off as rescheduled for June 24th.
Lift off occurred at precisely 14:30:00.07 local time as the lower 0.625m booster ignited with 67.2kN of thrust to push the rocket off the engine support collar with 3.6G of force. The guidance fins on both the first and second stage actuated right off the pad to roll the rocket from 90° to 50° as it began to head downrange using the same pitch program as the Ascension rockets. The rocket passed through Mach 1 at L+13s and a second later the guidance controls snapped the rocket over to 55° while momentarily increasing the pitch over rate – a behavior we have also seen exhibited by Ascension rockets.
Despite the control blip, the rocket continued to remain stable through Max Q of 54.236kPa @ 3.985km, L+17s. As the rocket approached Mach 1.4 and neared 500m/s surface velocity, the rocket began to exhibit difficulty in maintaining its heading. Although it was not able to constantly point where it wanted to go, it did not consistently deviate off course and was able to shakily follow its intended trajectory. This behavior continued through flame-out of the lower stage booster at L+34s and the following boost of the 2nd stage 0.35m SRB that ignited one second later and lasted until L+39s.
With the completion of the second stage boost the SRB was dropped one second later and the third stage vacuum Ospray engine was ignited at 14.1km while traveling at 632m/s surface velocity. Just 64ms after ignition the rocket experienced a non-explosive RUD, coming apart at the fuel tank. Everything from the probe core to the nose cone was still holding together and the AFCS recognized the event, triggering the recovery routines to prepare for chute deployment and splashdown. Thankfully the breakup, which significantly slowed the remaining upper third stage, occurred as the rocket slewed sideways and removed it from the path of the still rapidly ascending second stage booster.
After passing through an apokee of just 18.335km at L+1m5s the upper third stage tumbled down and popped its chute passing through 6km at L+2m15s. Unfortunately it could not also deploy its air brakes since they were lost with the fuel tank. This meant the upper third stage was still traveling in excess of 150m/s when it reached 600m and the chutes began to fully deploy. Normally the rocket would be traveling around 70-80m/s. Unlike Ascension main chutes that can adjust their deploy rates based on speed and altitude, the Progeny chutes are much simpler and do not have that capability. The chute was unable to arrest the upper third stage enough before it hit the water, still traveling in excess of 100m/s. Nothing survived the impact.
Flight Analysis
Rapid Unplanned Disassembly
Let’s tackle the biggest issue first – why did the rocket break up? A similar incident occurred when we attempted to fly the first Progeny Mk4 at maximum thrust. Its breakup occurred much lower however at 3.2km and was likely due to mounting dynamic pressure. Still, forces acting on the rocket remain to blame for this incident as well – namely the amount of drag that was being caused by the big blunt nose being pushed through air that remained relatively thick at the altitude of 14km. The lower altitude and meager thrust output of the Ospray engine (made worse by the denser air) meant that even at max 3° deflection it was unable to overcome the rocket’s desire to flip. Even our pointy-nosed Progeny rockets can want to flip if not enough thrust is present. While none of them have, you can see how the pitch of one is affected in this video.
Surprisingly the failure did not produce a large explosion, likely because as the fuel tanks came apart they remained intact thanks to higher design tolerances put in place after the Mk4 RUD. This spared the rest of the third stage and allowed it to attempt a recovery. While this didn’t work because the air brakes were also lost, we at least were able to see our fault tolerance code perform as it was supposed to in such an event.
Guidance Issues
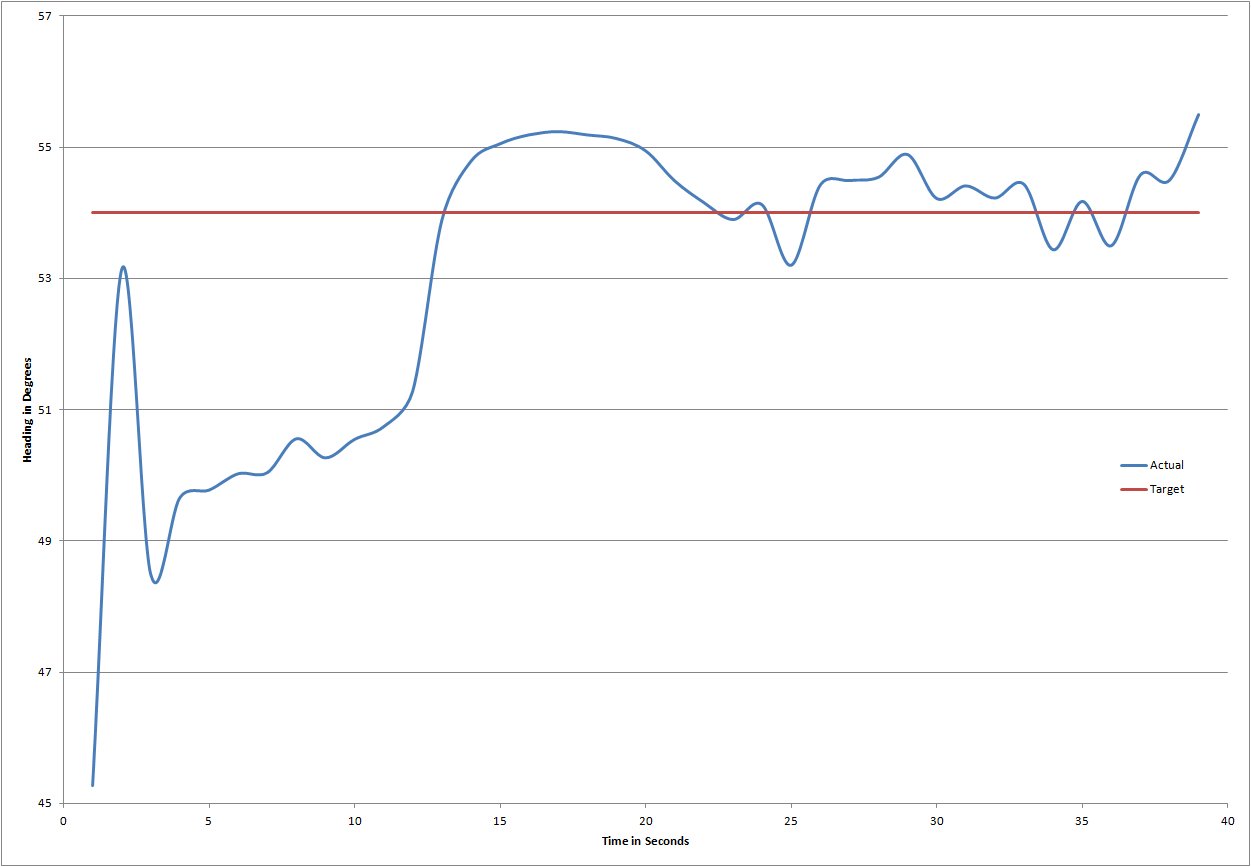
The proper launch azimuth for this flight was 54°. Despite rolling right off the pad before strong aerodynamic forces built up, like the recent Ascension flight the rocket failed to achieve its preset heading and remained off course until nearly 25 seconds into the ascent:
Click for high-res version
Once it finally locked into the correct heading it was able to hold to within 1 degree despite the turbulence produced by the supersonic shock wave in the thick lower atmospheric air. During the entire ascent where the fins were attached the roll/yaw saturation never exceeded 50% even during the transonic turbulence and even after the larger fins on the first stage were lost when that booster was decoupled.
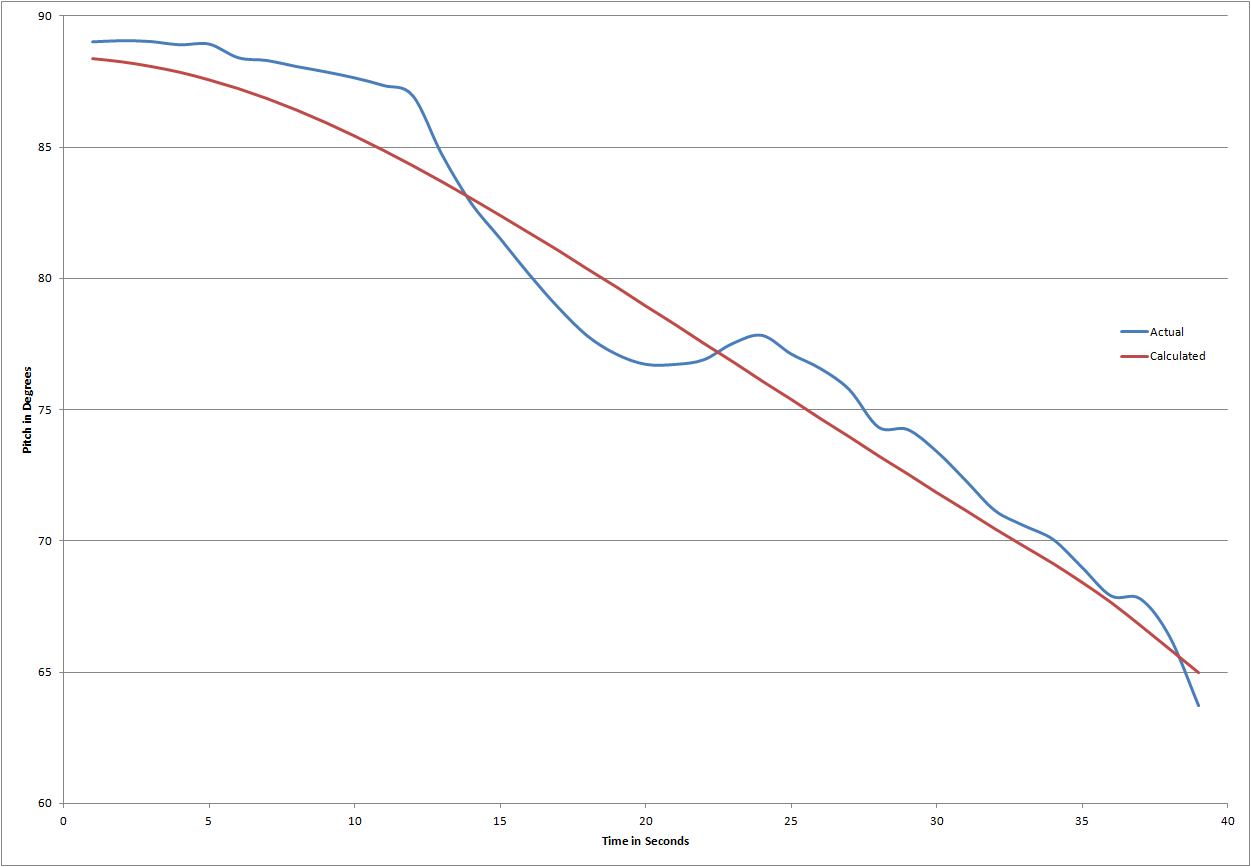
The pitch-over rate of the rocket also exhibited similar behavior to the Ascension flights in that it remained behind its target angle until the guidance “snapped” and brought it back on track:
Click for high-res version
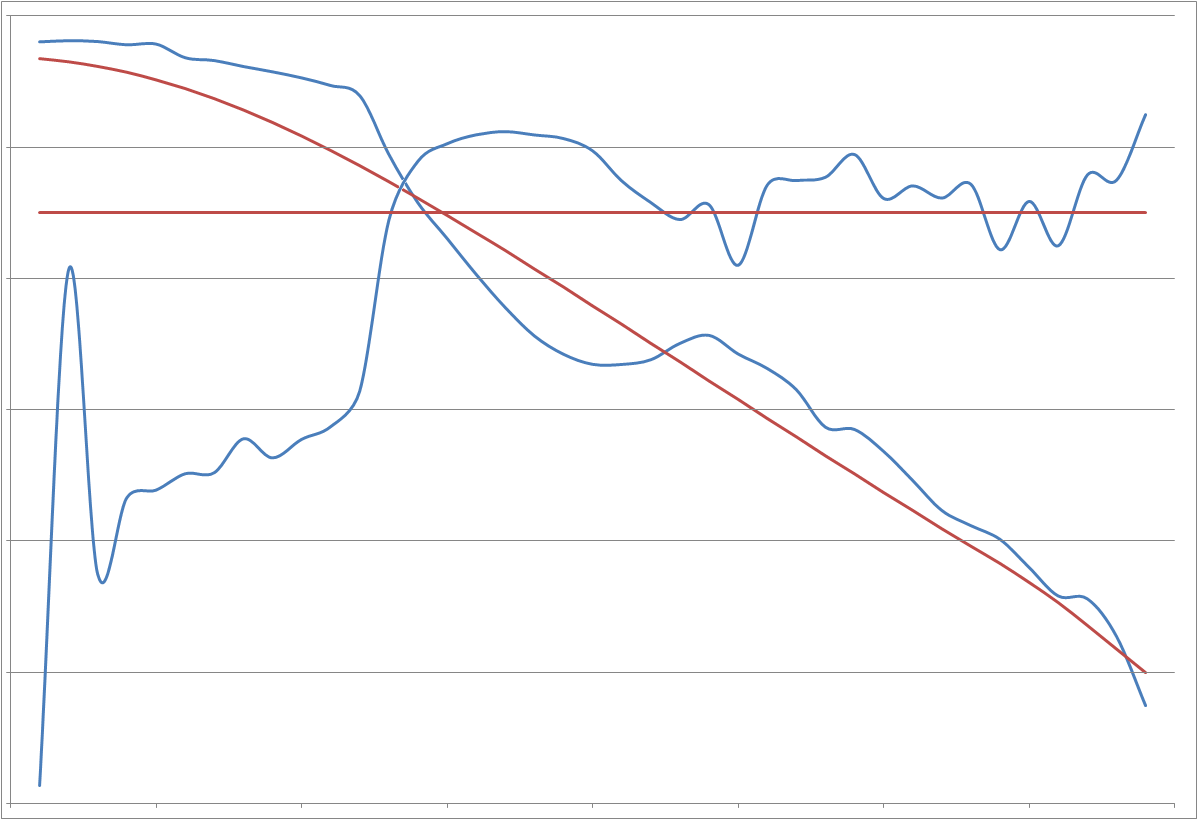
This time we also logged the pitch target the rocket was supposed to be at for the given point in the ascent to make sure that the right numbers were being sent to the guidance computer and they were, so the problem appears to be within the PID controller itself. This is made more apparent when you overlay the two above plots:
Click for high-res version
You get a large adjustment of the rocket guidance at the same time across both pitch and heading.
Launch Vehicle Designer
As with our Ascension launches, we are still seeing some issues with low atmospheric modeling when we compare the actual telemetry data with the projected data that we expected to see. Most notably is the dynamic pressure plots continue to remain much too high in LVD compared to the actual ascent:
Click for high-res version
Notice where things divert at 6 seconds. We see a similar sharp divergence from actual vs. projected data in various other plots including mass, velocity and altitude. We continue to work with the LVD developer to get to the bottom of this and correct or at least improve the issue.
Also note the large bump in the actual data at the end of the chart – turns out we forgot to reset the thrust of the second stage booster in LVD! It was still being modeled as a regular Progeny Mk6 second stage booster with reduced thrust output for a longer and gentler burn. So it’s actually not so bad that the rocket failed after the second stage because it was heading off on a very different, more vertical trajectory than planned and probably would have ended up coming down much shorter than anticipated.
Future Plans
To hopefully avoid another RUD on the next flight, we will use LVD to work out a better ascent into the upper atmosphere before the third stage is left to its own devices. This will mean a coast phase between the first and second stages just like the Mk6 however since it will remain under control of the fins on the second stage we will not be using pitch change to determine when to ignite the second stage. Hopefully by the time the third stage ignites the Ospray’s engine gimbal will be able to hold the rocket on course.
Future Mk7 iterations will also utilize new SRBs and LF/O engines currently under development for reduced thrust that will keep speeds more manageable for better steering. Now that the rocket can be guided we no longer have to rely on brute force via high thrust to keep the nose pointing in the general direction we want it to.
The programming team will work to expose more of the PID guidance controller and log additional data that will help us to see exactly what kind of adjustments and decisions it is making in its attempt to steer the rocket. They will work closely with Ascension team members to get similar data from those flights as well since the conditions are not the same (the larger rockets require more steering torque but also travel slower in the early launch stages).
Right now, with funds running low, the real question is when we will be able to afford another launch for the Mk7-A. Currently the Ascension Mk2 is our best bet for putting commercial payloads into orbit – 1.25m satellites are already being designed while smaller payloads have yet to be proposed by any commercial agency. So for now it looks like the future of the Progenitor program is dependent on excess profits being available from the Ascension program.
