






 After two failed attempts at orbit, the Ascension team was preparing for a third try when the decision was made to pivot away from achieving orbit and instead focus on sub-orbital flight to prepare for sending a kerbal up in the finalized capsule design still undergoing certification testing. With this in mind the team used the new Launch Vehicle Designer (LVD) from ArrowstarTech to develop a trajectory similar to our orbital flight attempts but designed to bring the capsule (or in this case the capsule test object) down over the waters just east of Ockr. This would allow for the maximum amount of time in space while still splashing down to avoid any dangerous terrain or higher elevations and remaining close to support assets. The third flight of the Ascension Mk1 was tasked with following this ascent profile and performing various technology tests while in space.
After two failed attempts at orbit, the Ascension team was preparing for a third try when the decision was made to pivot away from achieving orbit and instead focus on sub-orbital flight to prepare for sending a kerbal up in the finalized capsule design still undergoing certification testing. With this in mind the team used the new Launch Vehicle Designer (LVD) from ArrowstarTech to develop a trajectory similar to our orbital flight attempts but designed to bring the capsule (or in this case the capsule test object) down over the waters just east of Ockr. This would allow for the maximum amount of time in space while still splashing down to avoid any dangerous terrain or higher elevations and remaining close to support assets. The third flight of the Ascension Mk1 was tasked with following this ascent profile and performing various technology tests while in space.
The Flight
Part of the mission design called for the Mk1 tanks to not be fully fueled so the engines could burn all the way to exhaustion and allow the rocket to remain on trajectory without having to vent fuel in space or have a fuel-laden tank drop back down to Kerbin. The first attempt at a wet dress rehearsal after the rocket was installed on the pad failed due to the pumps in the service towers not onloading gas fast enough for the rocket to pressurize the greater empty space in the tanks in the scant seconds leading up to ignition. This led to a day’s delay as the problem was sorted out.
Other than that issue the lead-up to launch was flawless and the rocket left the pad on schedule under control of the AFCS, throttling up to full thrust as it cleared the service towers. Already facing 45° from north it only had to begin to pitch downwards as it rose higher. The pitch over was gradual until L+25s when the control surfaces registered a large movement and the rocket began to increase the rate at which its nose dropped. 39 seconds into the flight, at just under 7km ASL the rocket reached maximum pitch authority.
By now the rocket had just passed through 34.681kPa MaxQ and was continuing to accelerate while the throttle was pulled back based on a linear profile specified by the LVD. The rocket maintained its attitude and continued to point 45° as it rose and continued to pitch over at maximum deflection. Upon reaching 30km it was traveling at over 1km/s and began to experience heating due to air friction, which did not become serious enough to block radio communications and only lasted until 40km.
MECO occurred at L+1m24s almost exactly as predicted by the LVD however the inability of the rocket to pitch over fast enough left it climbing too steeply out of the atmosphere, which meant it would not be traveling either as high or as far as we had intended it to, heading for an apokee of only 255km instead of 374km. As the rocket continued to coast upwards from 60km controllers immediately began to prep for the sprint of commands that would need to be sent up so it could perform all its intended tasks in the shorter amount of time it had coasting through space.
Once it reached space at L+1m54s the decoupler released the payload test mass with just enough force to begin an initial separation. A second later the Reaction Control System (RCS) activated and began to thrust aft to push the test mass further from the lift stage. Had the RCS failed to fire the initial separation force was designed to create enough distance between the two objects by the time they re-entered, although this was based on a longer time spent in space.
While the RCS did switch on and fire, it failed to switch itself off after 10 seconds as programmed, prompting controllers to have to send several raw commands in an attempt to arrest its flight. They managed to accomplish this in just over 2 minutes without crashing the flight computer but now not only had they wasted some precious time in space but also more of the vessel’s cold gas supplies.
With only about 7 minutes remaining controllers were able to command the RCS system to orient the test mass in all directions – prograde/retrograde, radial in/out and normal/anti-normal. This was done using two control methods, coarse and fine. The coarse control fired all the gas ports at full thrust, which meant it moved faster but generally would oversteer and have to spend additional time (and fuel) correcting itself. Fine control was able to moderate the thrust output of the individual gas ports for a slower but smoother transition between the various orientations. The controllers were also able to take manual control of the thrusters, spin up the capsule and enable RCS to zero out the motion. With less than a minute to re-entry the test mass was commanded to point retrograde so its heat shield was facing the atmosphere before the RCS system was switched off to allow a ballistic flight with 23.52% of cold gas remaining.
The test mass began re-entry at L+12m09s and signal blackout occurred shortly thereafter due to plasma from re-entry heat. Just as we regained signal the flight computer suffered a runtime error and crashed. The test mass continued to broadcast its basic status signal however which allowed us to keep track of its descent and recognize the doppler shift when it deployed its parachutes based on a backup air pressure sensor. Mounted low on the test mass, the chutes flipped it over so the nose would impact the ground and leave the heat shield intact for later study while sacrificing the RCS thrusters mounted there.
The test mass came down in a hilly area between Sheltered Rock and Ockr, over 100km short of our intended landing zone. It was found by recovery crews embedded 1/4 of a meter up its nose in a hillside but otherwise intact. Upon returning to KSC the RCS system was disassembled for inspection and the heat shield was removed for inspection as well.
Flight Analysis
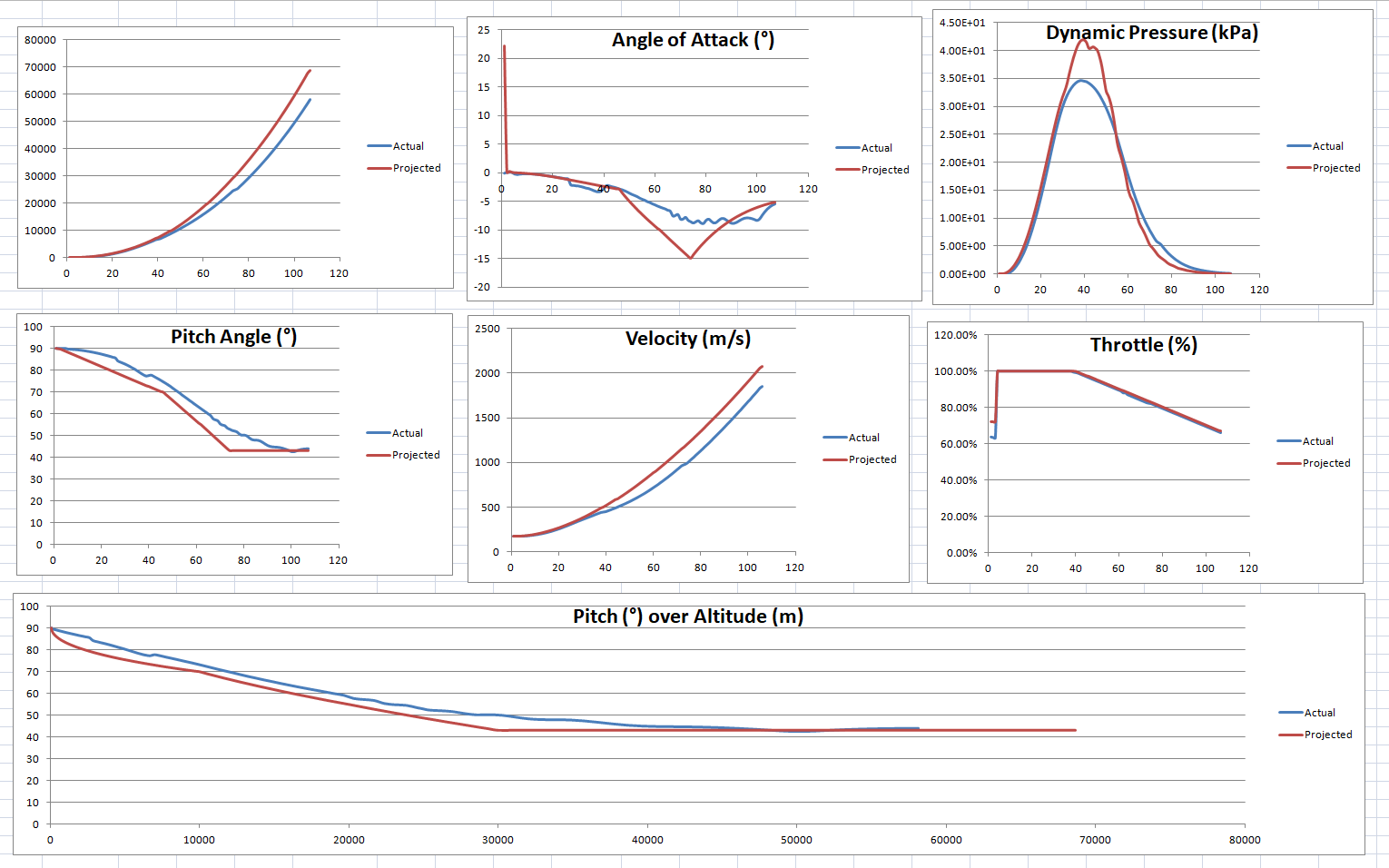 LVD Projection vs. Actual Data
LVD Projection vs. Actual Data
One of the big objectives on this flight was seeing how well the actual flight data would jive with predictions made by the Launch Vehicle Designer. As made evident in the flight overview however the rocket was not able to remain on the planned trajectory due to the limitations of its pitch authority. This of course led to significant deviations from the projected data. Almost all the deviations however can be attributed to the lack of pitch authority, which means had the rocket been able to stay on trajectory we would likely have seen a very close match up between the red and blue lines. This may be indirect verification but remains promising for future missions.
No Uncontrolled Roll
Lead Engineer Simon’s team in the VAB put extra effort into the build quality of these latest Mk1 rockets, making sure every step was documented and measured in case something needed to be reviewed as a factor in affecting the flight of the rocket. We wish we could have done this with the previous rocket, which exhibited a tendency to roll while it ascended and ultimately led to an even greater lack of pitch authority. This flight showed no roll tendency and the rocket remained on course throughout the ascent. While we can’t prove it, the accepted reason is the previous rocket had slightly misaligned guidance fins.
Reaction Control System
The RCS failing to shut off after pushing away the capsule was found to be due to a design mistake in how the thruster control software, which is what the AFCS talks to, was implemented. Although the AFCS did properly command the thrusters to cease firing aft, this was overridden by the current state of the main throttle, which was still set to 65% after MECO. The main throttle is supposed to be meant for just the engines, not the RCS system, so the mission script did not unlock the throttle after MECO. It probably should have done that anyways just as a general principle so the software engineers in charge of the mission script have accepted some responsibility as well. The RCS thruster software has been patched to ignore the main throttle setting.
Other than that, the system worked as designed and data analysis shows all ports were firing with expected force. Due to the asymmetric nature of the capsule, placing the thrusters to zero out all torque while rotating is not possible and in order to hold an orientation the system has to make constant small adjustments to compensate. This was expected but is still a steady drain on cold gas resources.
Re-Entry & Heat Shield
Because the flight computer crashed during re-entry we don’t have temperature data for the entire descent back into the atmosphere but we did capture the moment of peak heating at 22km when the outer skin of the test mass reached 1,220.2K (947.05°C/1,736.69°F) – toasty! This heat above 1,000K only lasted 11 seconds and was largely carried away via the shockwave produced by the capsule’s descent, keeping the interior of the test mass no warmer than 299K (25.85°C/78.53°F). It should be noted the interior temperature continued to rise after the skin temperature fell but seemed to stabilize – it was 299K for 4 seconds before the telemetry data ceased.
We know the heat shield didn’t actually do much to aid in the test mass staying cool because the surface of the shield only reached a maximum temperature of 337.9K (64.75°C/148.55°F) which gradually warmed its interior to 297.4K (24.25°C/75.65°F) before we ran out of telemetry data. The shield’s ablative material is designed to start being removed at 500K, which means although it came back crispy the heat shield was pretty much completely intact. It still acted as an effective buffer though and pushed the boundary layer of the supersonic shockwave further away from the test mass to reduce heating as designed.
The only other important factor during re-entry was the max G load, which peaked at 12Gs and was above 10Gs for just over 7 seconds. That’s a pretty rough ride but not deadly and would have been less if the test mass had been placed on the planned trajectory which was less vertical.
Speaking of verticality, the final aspect of this re-entry that needs to be considered is how steep it was. Coming down like this resulted in higher G’s but less-intense heating. The shallower entry that was planned would have eased up on the Gs but kept the capsule in the upper-atmosphere longer and given it more time to heat up. It’s possible some ablation could have occurred under these circumstances.
AFCS Crash
An improperly-defined variable related to the parachutes was the cause of the computer crash and the software engineering team is suitably mortified that it somehow slipped through their runtime testing. They’ve doubled-down on procedures to ensure that all the mission code is given a thorough vetting to avoid future problems.
Radiation Data
One of the reasons this trajectory was chosen is because previous flights of the Progeny Mk5/6 have shown that it carries the rocket north far enough to miss the radiation belt circling the equator before the rocket gets too high. We had a radiation instrument onboard to make sure no hazardous radiation above normal levels was detected and the data shows the belt was indeed passed by. This is great news for future kerbed flights.
Future Plans
The biggest issue is the inability of the rocket to pitch over. Although the solution pains Lead Engineer Simon considering how meticulously they installed the guidance fins on all 4 of our remaining Ascension Mk1 lifters, we have no choice but to take off the two responsible for pitch control and remount them on a fixed angle that will deflect the nose downwards at launch. The control surfaces can still deflect in the opposite direction to slow or even arrest the rate of downwards pitch, opening up a much greater range of authority for lowering the nose of the rocket. Because the fins are larger than the control surfaces it also means that we could potentially mount them at an angle that’s too great to compensate for, causing an eventual nose dive. Therefore just a single lifter will get the fin angle treatment and we will see how it goes on the next launch before modifying the rest.
The next payload is planned to be the Mk1 capsule that has spent the last 2+ months undergoing certification and is currently undergoing final reviews. If for any reason the review board finds it’s not suitable for flight we will order another test mass.
The asymmetric nature of the capsule and test mass could be compensated for with a reaction wheel system that would be able to hold orientation after the RCS system is used for rotation. This technology could be incorporated into a future space capsule but for now is still unproven. Expect more information on the development of a reaction wheel system in a separate announcement next week.
We don’t have any good thermal models, so simulating whether the heat shield would ablate when re-entering following the planned trajectory is not possible at this time. All we can do is place a heat shield on the capsule/test mass again and hope we get all the telemetry data from re-entry next time to find out.
We won’t know about the capsule flight status until next week at the earliest, it will take Simon and his crews at least a week to remount the fins and 2-3 weeks to prepare the payload depending on whether we have to order a new test mass or can just use the capsule. Right now the next Ascension Mk1 launch is slated for no earlier than March 7th.
