






 Now that we have the ability to launch actual kerbals into space, the unkerbed capsule no longer had to be a testbed for kerbed flight and was stripped of its control console and life support system. This made the interior much more spacious and capable of holding larger science equipment. Furthermore the hatch was modified so that it could be remotely opened and closed, which allowed for instruments inside the capsule to directly sample the space environment. We put this to good use in testing three of the Exremis probe instruments that had yet to see actual flight conditions: the magnetometer (mag), radio & plasma wave science (RPWS) and gamma-ray spectrometer (GRS). The RPWS and GRS were installed inside the capsule on a rotating column so each could be faced out the open door in turn over the course of the mission. The mag boom was originally supposed to go inside as well but miscommunication between the scientists & Ascension engineers meant it was built too large. Thankfully its slim profile while folded allowed it to be mounted externally on the fuel tank without too much fear of it being ripped off during ascent.
Now that we have the ability to launch actual kerbals into space, the unkerbed capsule no longer had to be a testbed for kerbed flight and was stripped of its control console and life support system. This made the interior much more spacious and capable of holding larger science equipment. Furthermore the hatch was modified so that it could be remotely opened and closed, which allowed for instruments inside the capsule to directly sample the space environment. We put this to good use in testing three of the Exremis probe instruments that had yet to see actual flight conditions: the magnetometer (mag), radio & plasma wave science (RPWS) and gamma-ray spectrometer (GRS). The RPWS and GRS were installed inside the capsule on a rotating column so each could be faced out the open door in turn over the course of the mission. The mag boom was originally supposed to go inside as well but miscommunication between the scientists & Ascension engineers meant it was built too large. Thankfully its slim profile while folded allowed it to be mounted externally on the fuel tank without too much fear of it being ripped off during ascent.
The Flight
On the day of the originally-scheduled launch, our recovery vessel MSV Aldeny radioed through the Ockr relay that conditions at the planned landing zone were too poor for safe operations. It was later forced to move off station entirely to find calmer waters and was not able to return until the end of the day. Thankfully conditions continued to remain good into the following day and although they slightly degraded here at KSC preparations were still undertaken to attempt a launch.
No issues arose during preflight and the rocket successfully left the pad on schedule under full control of the AFCS at 11:35:00.28 local time after a good ignition and throttle up to 1.2 TWR launch thrust. It held this until the service and crew towers were cleared before throttling up to full thrust, putting out 172kN with 1.7Gs of acceleration. Guidance was also enabled at this time to roll the rocket to a heading of 53° before beginning to pitch over and head downrange. At L+39s it reached Mach 1 and four seconds later it reached a TWR of 2.5 and locked its throttle to maintain that acceleration. This was to reduce vibration and aerodynamic stress to not damage the science instruments both onboard and outboard. At L+45 seconds the rocket passed through a maximum dynamic pressure of 32.45kPa @ 7.782km while traveling at just under 470m/s orbital velocity.
After the first minute of flight all the usual guidance issues with pitch and heading had smoothed out and the rocket continued its ascent into the upper atmosphere on course. Apokee was pushed out of the atmosphere at L+1m24s and eleven seconds later the rocket’s pitch reached 44°, where it was commanded to hold attitude for the remainder of the engine burn. As the atmosphere grew thinner and thinner however the control surfaces began to lose authority and the rocket began to nose downwards. This was initially interpreted as the angled fins still having some effect even in the rarefied upper atmosphere and overcoming the control surfaces but once the rocket reached space at L+2m6s and continued to increase its rate of downwards pitch it was obvious there was some off-center thrust at work.
The engine was allowed to burn out completely at L+2m35s, leaving the rocket in a slow end-over-end tumble of about 0.5 RPM, which was too slow to have any detrimental effect on the mission. The mag boom was unlocked and deployed at L+3m20s, extending without issue and locking into place. Next the RPWS was deployed out the open capsule hatch at L+3m45s, its antennae sticking out into space. Both instruments began to immediately gather and store data. We did not have enough space in the capsule to store all the data we planned to collect so most was meant to be transmitted back down to the surface. However the high-rate data (regular telemetry is low-rate) came down corrupted and controllers on the ground were unable to work around the problem.
As the entire rocket, since the mag boom was on the fuel tank, continued to coast upwards the decision was made to limit science observations so we could store data from just the upper region of space above 250km. The RPWS was left deployed until just prior to 327.445km apokee before retracting back into the capsule so the instrument column could be rotated to bring the GRS to bear on the open hatch. It was successfully deployed at L+9m19s, nine seconds after passing through apokee. As the rocket reached 250km in altitude on the way back down, the GRS was retracted and the capsule hatch closed in preparation to separate from the lift stage. The mag boom was unable to be retracted but also did not need to be.
The command was sent to detach the capsule at L+13m48s, which performed an automatic 10s thrust of its cold gas thrusters aft to push it well clear of the fuel tank. Normally this operation would have occurred shortly after reaching space and allowed even more distance to grow between the two prior to re-entry. However in this case the atmosphere was less than 3 minutes away and so the capsule was pointed radially and given manual commands to thrust further forwards and increase the distance from the lift stage before being commanded to orient retrograde for atmospheric interface, which occurred at L+16m8s.
The downward rotation from the offset thrust during the end of the engine burn also had a slightly radial component that had pushed the rocket’s trajectory further north than planned, but still ended up over water and within range of the Ockr relay aerial. The capsule did not quite reach a stable retrograde position in time and wobbled a bit through the initial re-entry but remained facing the proper direction. After 29s of comm blackout signal to the rocket was recovered and at L+16m57s terminal velocity had slowed the capsule enough that the chutes could be pre-deployed, which also detached the Launch Escape System. We had an instrument failure in our logging system but we calculate the capsule only pulled ~13Gs during re-entry. It fell below the horizon and out of contact with mission control just 7s before fully deploying its chutes at L+18m19s while 624.907m above the water. It splashed down intact at L+20m9s, 742.051km downrange, and was recovered later that day by MSV Aldeny.
Flight Analysis
Late Ascent Unbalanced Pitch Over
 What happened once the rocket left the atmosphere was easy to determine when post-flight analysis took a look at the distribution of mass as the tank emptied of fuel. Down below ~15% the center of mass shifts just low enough to unbalance the rocket and create a torque movement downwards and to the left. The image above shows this via the small circular arrow. The right-most fin is attached to the bottom of the rocket. The main cause of this was determined to be the angled fins distributing their mass off-center.
What happened once the rocket left the atmosphere was easy to determine when post-flight analysis took a look at the distribution of mass as the tank emptied of fuel. Down below ~15% the center of mass shifts just low enough to unbalance the rocket and create a torque movement downwards and to the left. The image above shows this via the small circular arrow. The right-most fin is attached to the bottom of the rocket. The main cause of this was determined to be the angled fins distributing their mass off-center.
This behavior has been evident in all previous Ascension Mk1 capsule flights but it was masked by the downward angle of the fins – any rotation was attributed to them – and also by the fact that all previous missions ended their burn in the atmosphere when the control surfaces still had a little bit of authority to counteract the effect. Except for the last kerbed mission, but that saw a rapid pitch-over early in the flight so although the engine burned out of the atmosphere the rocket was already rotating due to earlier control surface authority being exceeded so no unbalance of mass was suspected.
Right now there is no way to counteract this except to keep the rocket’s ascent burn within the atmosphere. The above image also shows the effect the Reaction Control System downward-facing thrusters would have with the blue arrows. In the dialog in the upper-left you see that there is still 0.547kNm of torque in effect, so they would not be of any help. Unless we start using more powerful RCS thrusters (this has been put off until absolutely necessary due to the highly toxic nature of monopropellant) our only other option is a gimbaled engine, but one of this size has yet to be developed since we are still looking to prove the technology on the smaller Progeny Mk7 series.
Overall the lesson has been learned to do a more thorough thrust balance check during all design stages of the rocket. Again, we had no idea this issue even existed until now but it could have been caught and mitigated right from the beginning when we first adjusted the fin angles had we gone looking for such a problem.
Launch Vehicle Designer – Mistakes Were Made
 |
 |
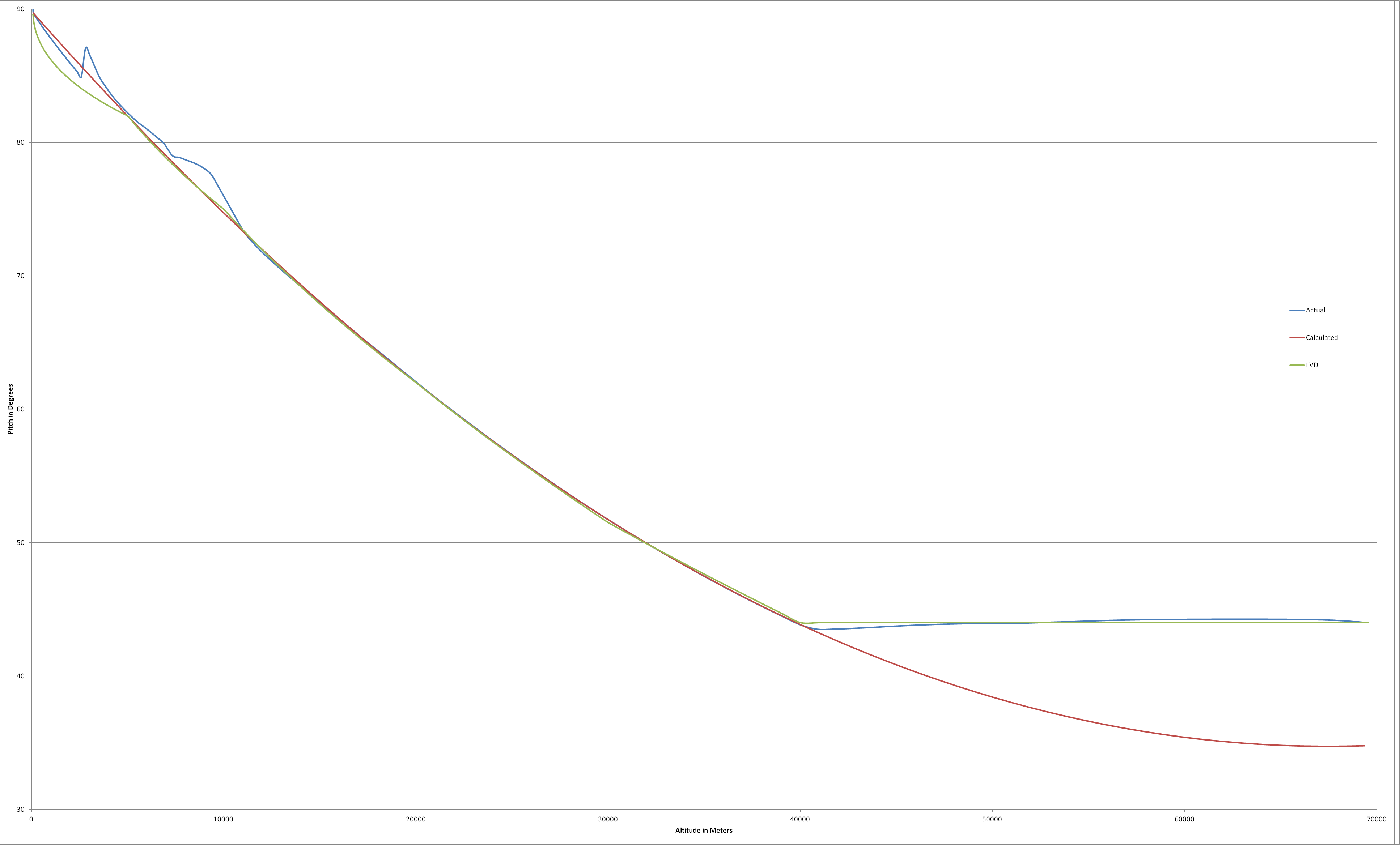
Overall our use of the LVD is getting better but design mistakes are still finding their way in to the ascent profile and there are two new things we now have to look out for. On the left is the pitch profile and note how the green line starts by dipping downward before returning to align with the calculated profile. This was due to a slight error in how the steering model was handled early in ascent. The tricky issue here is that when the pitch plot is output to check its accuracy you see a good downward gradient as planned, however that plot is drawn against time rather than altitude, where the above error becomes apparent.
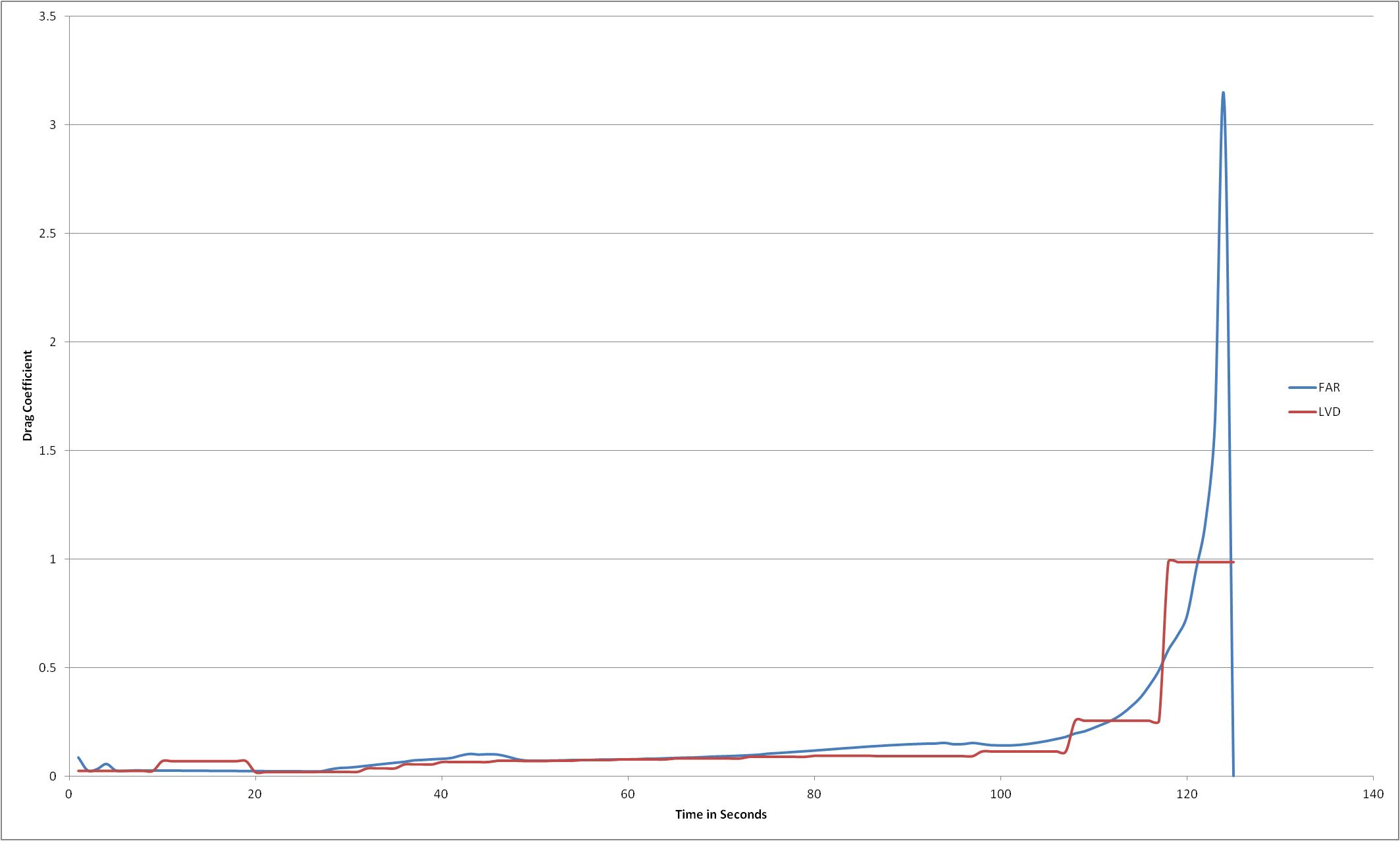
The plot on the right is the drag coefficient value (Cd) as it updates during the ascent to provide proper drag modeling on the rocket. It is too tedious to update it every single kilometer of altitude during the ascent so average values are used in various ranges, hence the step-up nature of the red simulated plot versus the actual data in blue. However notice in the beginning the red line bumps upward for a bit before returning to its proper place following the blue line closely. This is still an unknown error in the Cd updating – we’ve reported it to the developer but have been unable to figure out where it comes from and why it is there. It should have been caught and fixed during review of simulated data but was missed. We’ve not seen it return in fresh ascent profile designs.
Overall Ascent Performance vs. LVD
Despite the above rather minor problems you can also see that the ascent simulation was very much spot-on in bother regards. The usual early-ascent guidance issues are still evident in the pitch plot and this led to some obvious deviation for much of what was planned versus what actually happened – but if we can solve the guidance problem and stick to the planned profile we could see a rather precise trajectory result, which is important for saving fuel on future orbital insertions or direct ejections.
 Above is a normalized plot of the Cd and pitch data so we can see the correlation between the guidance issues and the relatively rapid increase in drag, which looking back at the Cd plot further above you see the actual drag data slightly exceed the simulated Cd. Just more proof that if we can get the rocket under control in the early stages of ascent we’ll see better results in our final actual trajectory versus planned.
Above is a normalized plot of the Cd and pitch data so we can see the correlation between the guidance issues and the relatively rapid increase in drag, which looking back at the Cd plot further above you see the actual drag data slightly exceed the simulated Cd. Just more proof that if we can get the rocket under control in the early stages of ascent we’ll see better results in our final actual trajectory versus planned.
 |
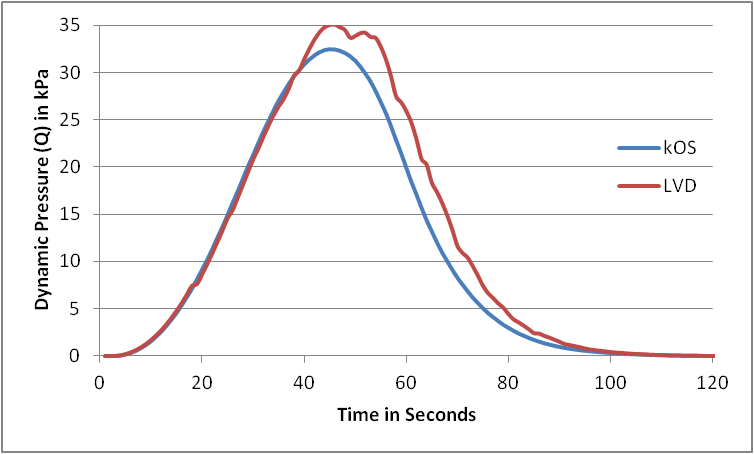 |
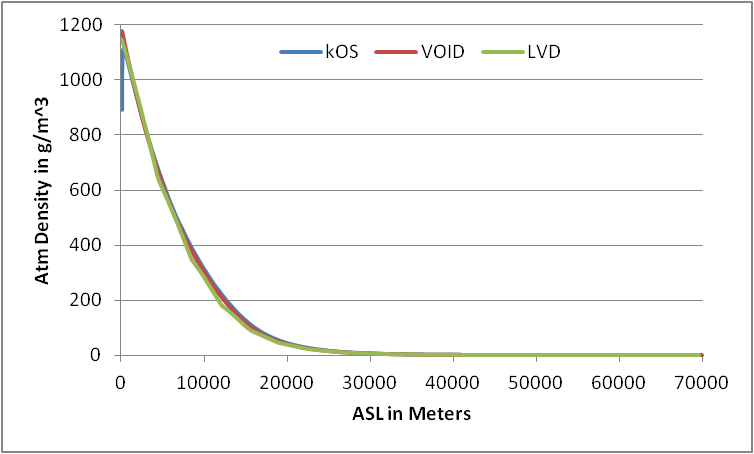
There is still some minor concern regarding the above plots. If you look closely at the one on the left for atmospheric density you will see the linear LVD curve breaking from the more precise data collected by our logging instruments. How much of an effect this causes has yet to be determined and we are talking to the developer about it. The plot on the right is a comparison of dynamic pressure and while the slight deviation can be explained away from the excess drag caused by the guidance issues, the double-hump in the LVD data is a potential issue. However the latest ascent designed for the next kerbed mission does not show a hump so we will see if it is a problem that has been resolved in a recent release.
Pitch Hold Delay
The one guidance issue that we know the cause of and will be fixed is at the end of the ascent when the rocket is commanded to hold a specific pitch angle, in this case 44°. You can see in the pitch plot up at the beginning of the flight analysis that the rocket actually overshoots the target and then also over-corrects. The reason for the overshoot is the rocket isn’t commanded to hold pitch until it actually reaches the pitch target. Given how little authority the control surfaces now have due to the thin air, arresting its downward rotation takes longer and this same reason also leads to the over-correction in the opposite direction.
Communication Issues
Both the capsule antenna and the ground antenna at our downrange stations have been examined to determine why we could not receive proper high-rate data transmission during the mission and it turned out that there were some cabling issues in the capsule due to the interior retrofits that were missed. Lead Engineer Simon assures us that they have been properly repaired.
Future Plans
Simon has modified the guidelines for their design teams to ensure that rockets are re-checked when modified for mass distribution changes even when it may not be obvious. While the next planned ascent will use fins only angled 1° and thus present less of a torque issue as fuel drains, the decision was made to still make the rocket burn out within the atmosphere to ensure it stays right on course.
Final design review for ascent profiles will now take a closer look at all data the Graphic Analysis tool can plot out, and do so in ways other than just over time, in order to identify areas where the simulated rocket is not behaving as expected.
Already implemented for the next launch, we will attempt a higher fidelity Cd model for the later stages of the ascent. Referencing the Cd plot above you can see how the rapid increase in the upper atmosphere is met with only a few average step updates. Instead of ending with drag updates at 40, 50 and 60km the updates will occur at 40, 45, 50, 53, 56, 60, 62, 64, 66 and 68km.
We will continue to collect and analyze all the data we can to see if we can finally determine the cause of early guidance issues in the pitch profile, and in some cases proper heading hold.
The pitch hold will be locked in sooner – so say we want to hold pitch at 44° we would tell the rocket to do that when it passes 42° to give it time to begin to slow its turn over keeping in mind its limited control authority and hopefully not blow past the target.
A new pre-launch procedure was put into effect for this mission, you can see it in action here. This will continue for all control actuation surfaces to ensure that the rocket is able to steer correctly off the pad in the event that sensors from the vehicle are reporting good data when an issue actually exists in the hydraulics.
